Variation de la contrainte au sein d'un corps
Dans un corps soumis à des contraintes, les composantes de la contrainte varient généralement d'un point à l'autre. Ces variations ne sont pas arbitraires ; elles sont régies par la deuxième loi de Newton. En appliquant cette loi à un élément infinitésimal, on peut trouver les équations gouvernant la variation de la contrainte dans un corps.
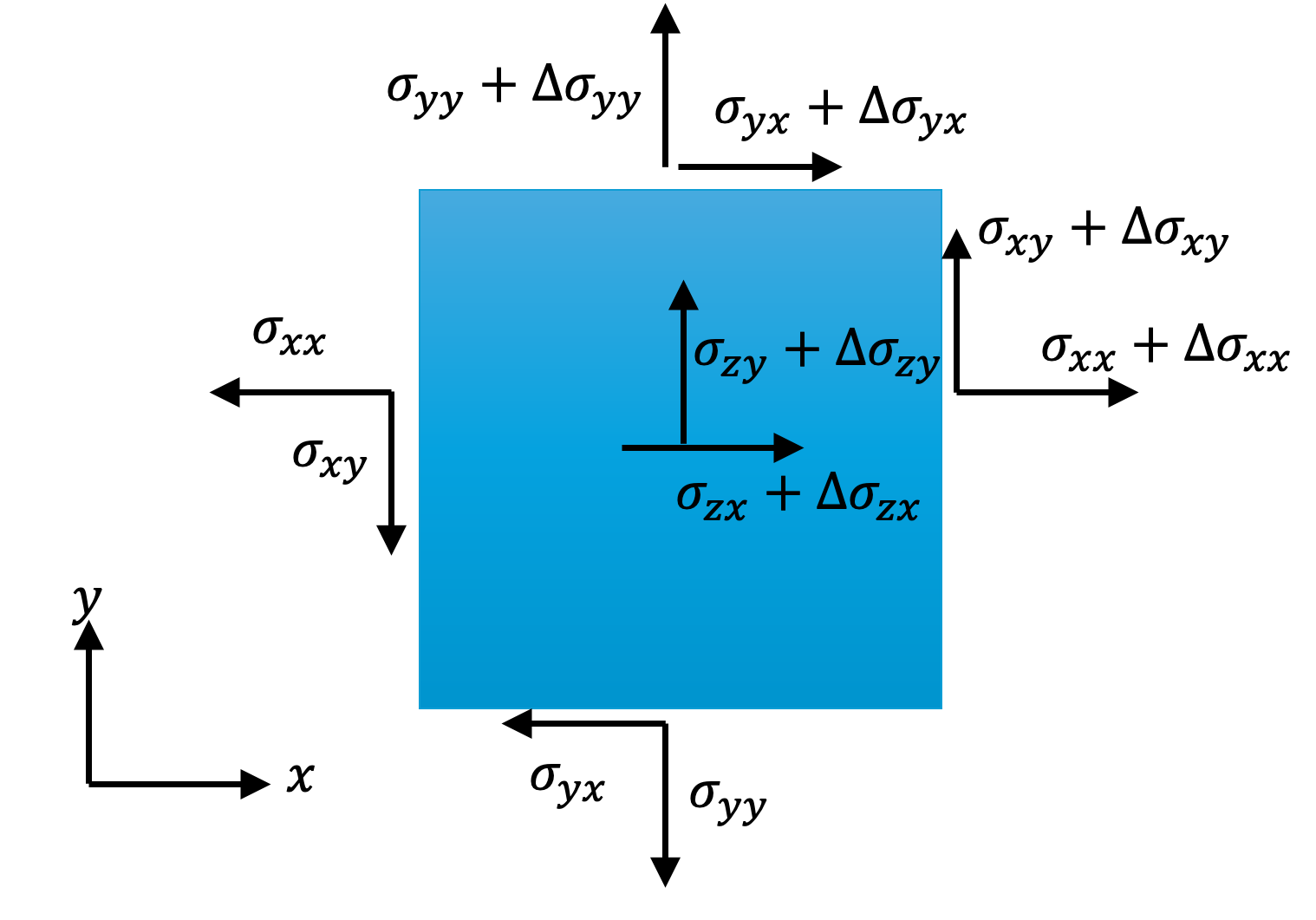
Considérons un élément de dimensions , et . Les composantes de contrainte agissent sur chaque face de cet élément. Sur chaque face de cet élément cuboïdal, les composantes de contrainte peuvent différer de celles sur la face opposée. Par exemple, si la composante xx de la contrainte sur une face est , alors sur la face opposée, elle sera prise comme .
Soit la force volumique par unité de masse. Par exemple, si l'on ne considère que la gravité, alors , où est l'accélération gravitationnelle. Par conséquent, la composante de la force due à la force volumique est où est la masse volumique au point.
Maintenant, en sommant les forces agissant dans la direction xxx dues aux contraintes sur toutes les faces et à la force volumique, et en appliquant la deuxième loi de Newton , on obtient