Symétrie du tenseur des contraintes
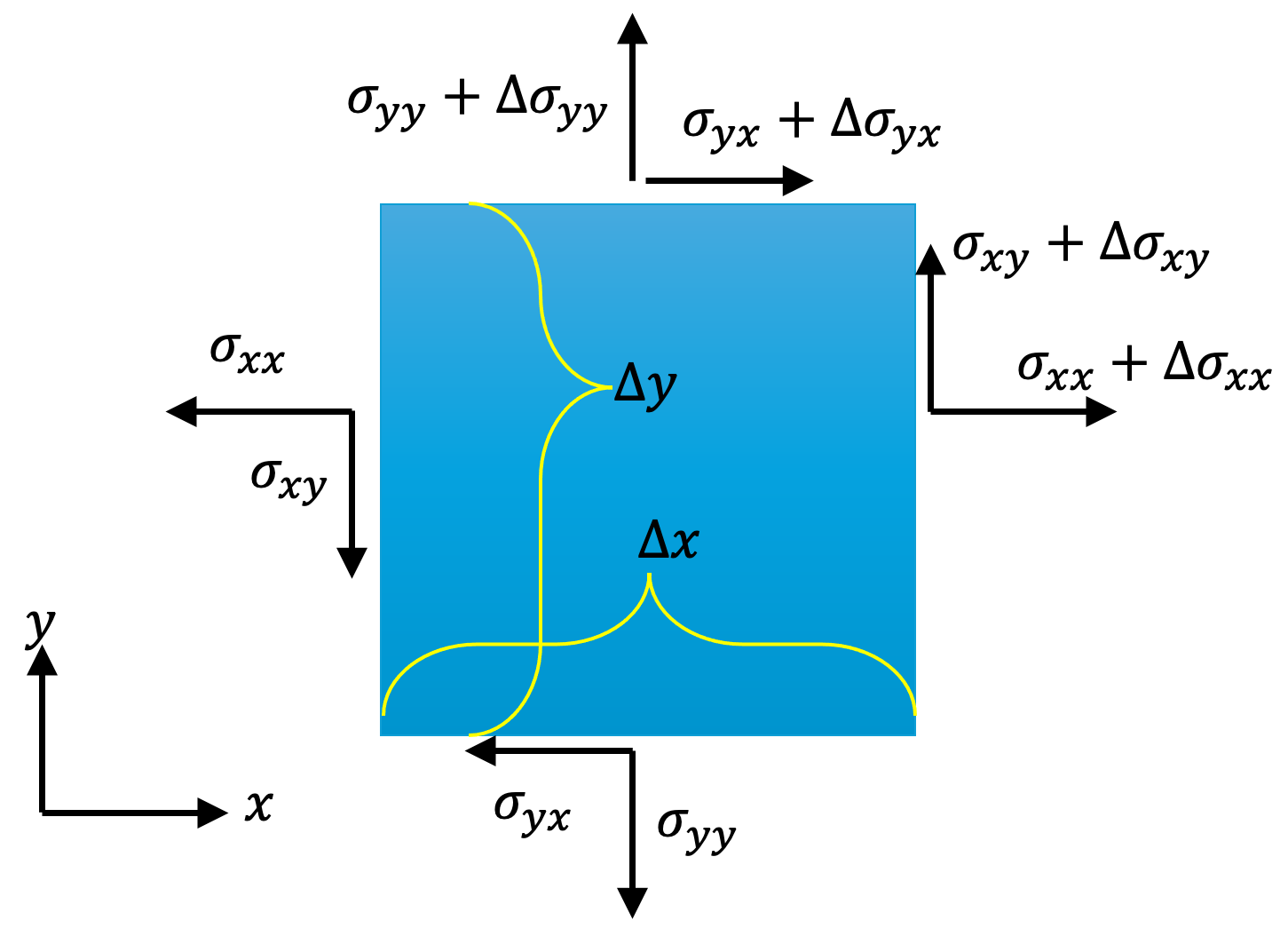
Considérons un cuboïde rectangulaire de dimensions , , et .
Il découle de la deuxième loi de Newton pour le mouvement de rotation que où est le moment résultant autour de l'axe z, est le moment d'inertie (ou masse rotationnelle) autour de l'axe et est l'accélération angulaire.
En statique, nous rappelons que le moment d'inertie d'un bloc rectangulaire autour de l'axe centroidal est où est la masse de l'élément. En exprimant en termes de densité, nous pouvons écrire où est la masse volumique du matériau au point.
Les composantes de contrainte qui contribuent à sont les contraintes de cisaillement dans le plan . Les forces volumiques ne contribuent pas au moment. Ainsi, le moment total peut être exprimé par
En appliquant la même logique pour les rotations autour des axes x et y, nous pouvons prouver que et . Cela signifie qu'en général et le tenseur des contraintes est toujours symétrique, et pour le spécifier, nous n'avons besoin que de 6 composantes indépendantes (au lieu de 9). Le résultat reste valable que le corps soit au repos, en mouvement uniforme ou en accélération. 1 Ce résultat est connu sous le nom de Deuxième loi du mouvement de Cauchy.
- Le seul cas où la symétrie des contraintes peut être violée est lorsque des couples de contraintes (moments répartis) existent. Ils entrent en jeu pour des matériaux très spécifiques dans des cas particuliers. Ce phénomène n'est pertinent que pour les matériaux où la microstructure sous-jacente influence la réponse mécanique macroscopique, une considération au-delà de la théorie classique.↩︎