Relation entre le vecteur de traction et le tenseur des contraintes
Pour trouver le vecteur de traction
Puisque le tétraèdre est en équilibre statique, la somme de toutes les forces doit être nulle. L’équilibre des forces dans la direction x donne : Ici, le terme est la force sur la face oblique, les termes sont les forces sur les faces de coordonnées, et est la force volumique.
Nous pouvons utiliser deux relations géométriques clés :
- Les aires des faces de coordonnées sont les projections de la face oblique :
- Le volume d’un tétraèdre est , où est la hauteur perpendiculaire du point à la face oblique.
En substituant ces relations dans l’équilibre des forces et en divisant par , nous obtenons :
Pour trouver le vecteur de traction au point , nous faisons tendre les dimensions du tétraèdre vers zéro. Dans cette limite, la hauteur tend vers zéro, ce qui fait disparaître le terme de force volumique. Il en résulte la composante x du vecteur de traction :
En appliquant la même logique aux directions y et z, nous obtenons les autres composantes :
Comme discuté précédemment, le vecteur de traction (également appelé contrainte) peut être décomposé en deux composantes : (1) une composante de contrainte normale et (2) une composante de contrainte de cisaillement.
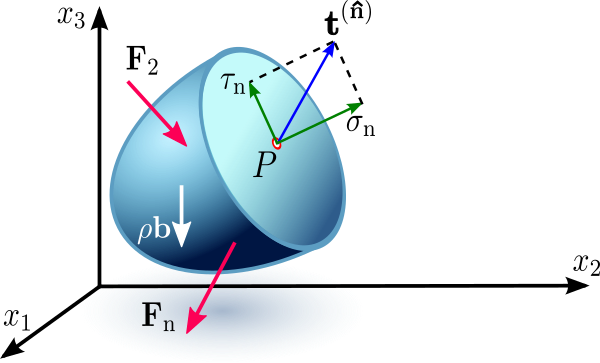
D’après la figure ci-dessus, il est clair que et donc
Exemple1 Un point matériel est dans un état de contrainte ayant les composantes suivantes :
- Calculer le vecteur de traction sur un plan coupant les axes x, y, z respectivement à 1, 2 et 3.
- Calculer la norme de la contrainte normale sur le plan.
- Calculer la norme de la contrainte de cisaillement sur le plan.
- Calculer la direction de la contrainte de cisaillement sur le plan.
Solution
Nous trouvons d’abord le vecteur unitaire normal au plan.
L’équation d’un plan coupant les axes en x=1, y=2, z=3 est : Ce plan est normal au vecteur :
En normalisant :
(a) Vecteur de traction sur le plan
Le vecteur de traction est :
(b) Contrainte normale sur le plan
La contrainte normale est la projection de sur :
(c) et (d) Vecteur contrainte de cisaillement et sa norme
Le vecteur contrainte de cisaillement est la composante de tangente au plan :
La norme est :
La direction est :
✅ Résultats finaux
- Vecteur traction :
- Contrainte normale :
- Norme de la contrainte de cisaillement :
- Direction de la contrainte de cisaillement : le long de
- Cet exemple est tiré des notes de cours du Prof. Suo pour le cours ES240 à l’Université Harvard, avec des adaptations mineures.↩︎