Planar Stress Stress. Transformation in 2D
État plan de contrainte
Dans de nombreux problèmes d'ingénierie, une analyse tridimensionnelle complète des contraintes n'est pas nécessaire. Un exemple simple et très courant de telles situations est celui où l'on a affaire à un système plan de contrainte. On dit qu'un corps est en état plan de contrainte lorsque les contraintes sur un plan donné ne sont que des contraintes normales. Ce plan est souvent pris perpendiculaire à l'axe z. Dans ce cas, les contraintes de cisaillement impliquant la direction z s'annulent : σzx=σzy=0 et le tenseur des contraintes prend la forme : Un cas particulier de l'état plan de contrainte est celui où, en plus des contraintes de cisaillement, la contrainte normale dans la direction z, σzz, s'annule également ; on parle alors de problèmes de contrainte plane. C'est-à-dire que, dans un problème de contrainte plane, le tenseur des contraintes ressemble à : Dans ce cas, σxx, σyy et σxy ne varient pas le long de l'épaisseur du corps. Autrement dit, ils ne dépendent que de x et y et sont indépendants de z. 1
Une autre catégorie importante de problèmes plans est celle des problèmes dits en déformation plane, qui seront abordés plus tard.
Dans la suite, nous utilisons souvent les notations de l'ingénieur pour les composantes de contrainte, c'est-à-dire
Transformation des contraintes
Supposons que les composantes de contrainte dans le repère x-y d'un problème de contrainte plane soient données. Nous voulons maintenant trouver les composantes de la contrainte dans un nouveau repère obtenu par rotation des axes x et y d'un angle .
Si la longueur du plan oblique est , alors les longueurs des côtés de l'élément perpendiculaires aux axes x et y sont respectivement et .
Soient et les composantes du vecteur contrainte agissant sur le plan oblique. Il découle alors de la somme des forces le long des axes x et y que
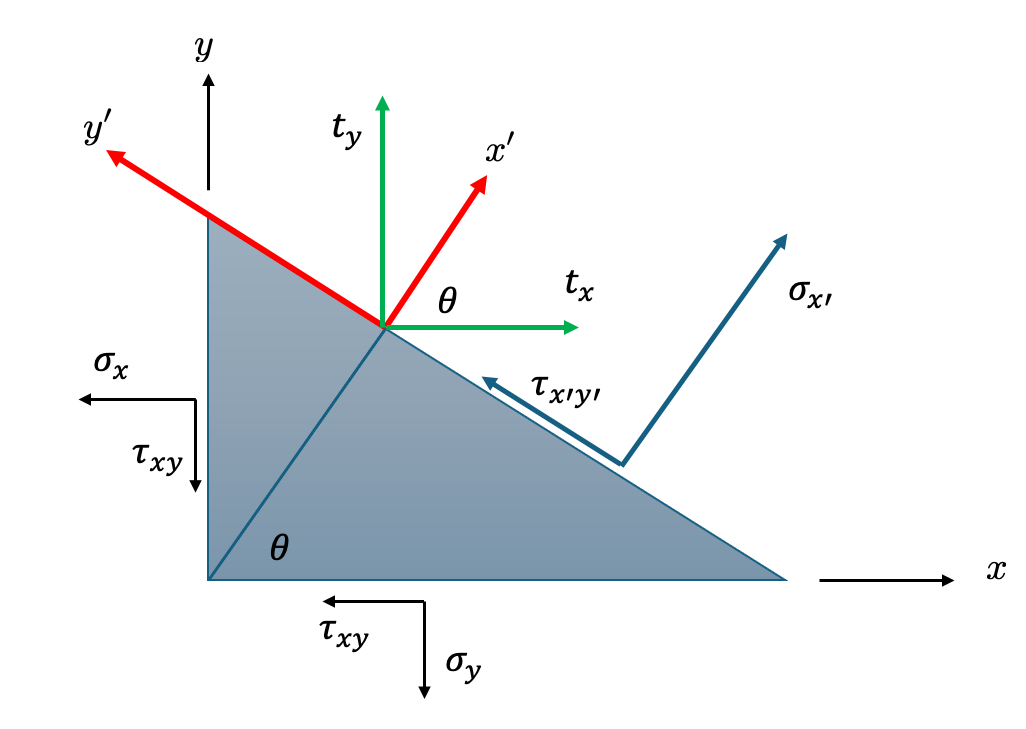
Le même résultat peut être obtenu si l'on note que est le vecteur contrainte sur un plan dont le vecteur normal unitaire est :
Puisque
nous pouvons écrire les équations (5) sous la forme
Nous notons également que
Puisque , si est une solution de l'équation (9), l'autre est . Ainsi, les directions principales sont des directions perpendiculaires (ou de manière équivalente, deux plans qui n'ont pas de contraintes de cisaillement sont perpendiculaires).
Si l'on souhaite déterminer les contraintes principales, il faut trouver et si est donné par (9), puis reporter les résultats dans les équations (6).
Puisque on a
Comparons à l'angle auquel se produisent les contraintes principales :
En reportant dans l'équation de transformation de la contrainte de cisaillement, on obtient la contrainte de cisaillement maximale :
Cercle de Mohr des contraintes — Deux dimensions
O. Mohr a introduit une méthode graphique pour représenter l'état de contrainte en un point sur tout plan oblique. Cette approche graphique nous permet de
- Déterminer rapidement les contraintes principales (, ) et leurs orientations.
- Trouver la contrainte de cisaillement maximale dans le plan () et son orientation.
- Résoudre les composantes de contrainte sur n'importe quel plan arbitraire sans calculs longs.
Considérons les équations pour
Si nous élevons les deux équations au carré, nous obtenons :
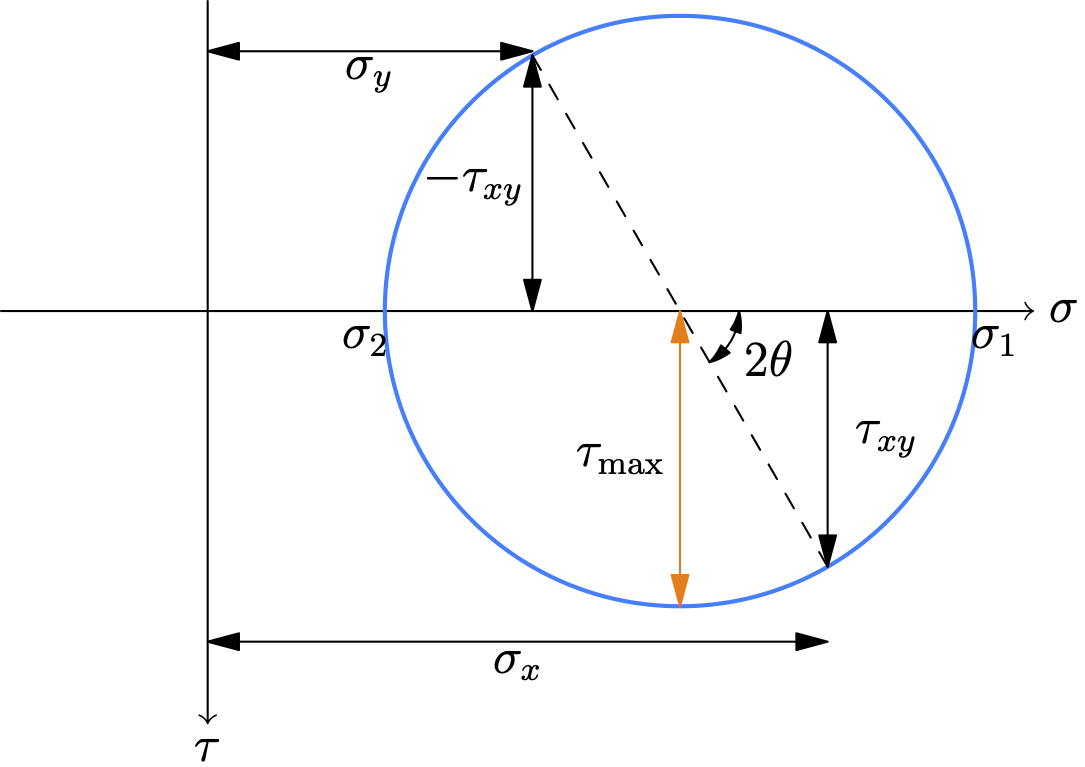
En comparant l'équation ci-dessus avec l'équation d'un cercle de rayon et de centre : nous réalisons que (14) est l'équation d'un cercle de centre et de rayon
Comment utiliser le cercle de Mohr
Une fois le cercle tracé, tous les états de contrainte possibles pour tout angle sont représentés sur sa circonférence.
- Contraintes principales (σ₁ et σ₂) :
- Ce sont les points où le cercle croise l'axe horizontal σ. En ces points, la contrainte de cisaillement est nulle.
- σ₁ (Contrainte principale maximale) est le point le plus à droite : .
- σ₂ (Contrainte principale minimale) est le point le plus à gauche : .
- Contrainte de cisaillement maximale dans le plan (τmax) :
- Elle est représentée par les points le plus haut et le plus bas du cercle.
- Sa valeur est égale au rayon : τmax = R.
- La contrainte normale aux points de cisaillement maximal est la contrainte moyenne, σmoy.
- Contraintes sur un plan arbitraire :
- Pour trouver les contraintes sur un plan tourné d'un angle θ dans le sens anti-horaire par rapport à la face x sur l'élément physique, vous devez tourner de 2θ dans le sens anti-horaire à partir de la ligne de référence CX sur le cercle de Mohr.
- Les coordonnées de ce nouveau point sur le cercle vous donnent le nouvel état de contrainte (σx’, τx’y’).
Règle clé : Une rotation de θ sur l'élément de contrainte physique correspond à une rotation de 2θ dans la même direction sur le cercle de Mohr.
- L'affirmation selon laquelle les contraintes dans le plan sont indépendantes de la coordonnée z est une conséquence directe de l'annulation des contraintes de cisaillement σxz et σyz. Cela peut être démontré en combinant les équations d'équilibre avec les lois de comportement contrainte-déformation du matériau. Toutefois, pour que ce modèle soit physiquement valide, la dimension z de l'objet doit être très petite par rapport à ses autres dimensions.↩︎