عناصر مستطیلی
در حالی که المان مثلثی ساده است و میتوان از آن برای مشبندی هر هندسه دوبعدی استفاده کرد، دقت آن به دلیل فرض کرنش ثابت محدود میشود. برای بهبود این وضعیت، المان مستطیلی ۴ گرهی را معرفی میکنیم. این المان توزیع کرنش پیچیدهتری را امکانپذیر میسازد و به نتایج دقیقتری منجر میشود.
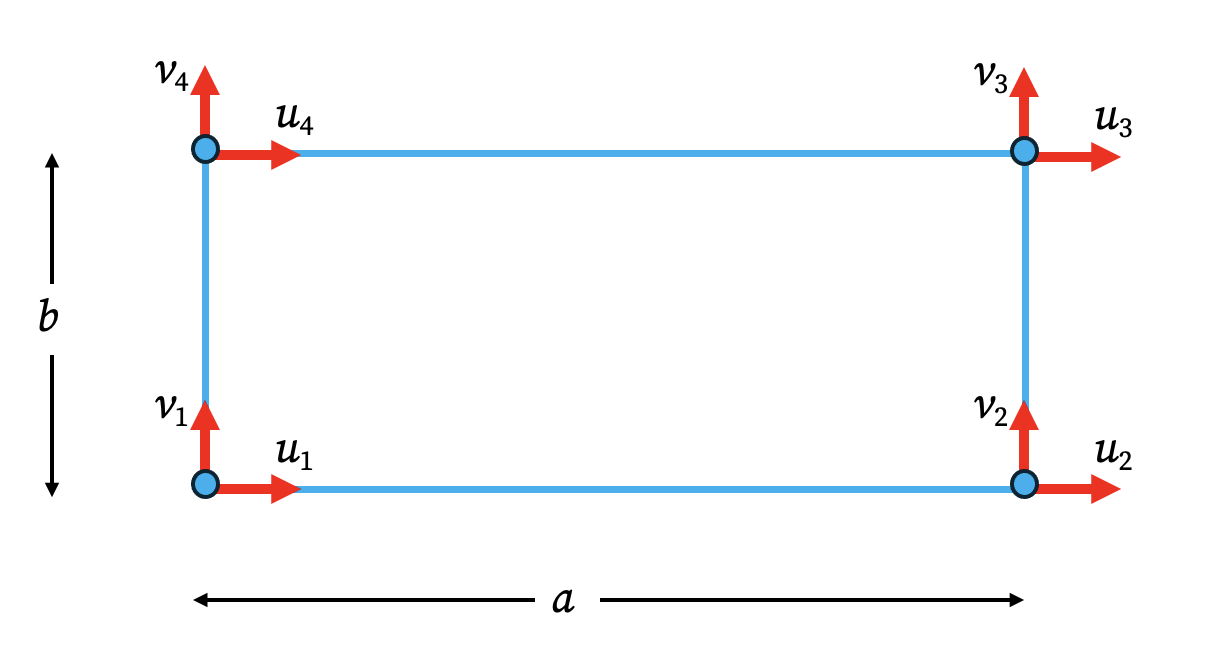
۱. میدان جابجایی
برای این المان، میدان جابجایی (به عنوان مثال، برای جابجایی u) با استفاده از یک چندجملهای چهار جملهای تقریب زده میشود. یک افزودنی حیاتی جمله xy است که توزیع کرنش غیر ثابت را امکانپذیر میکند.
این را میتوان به فرم ماتریسی نوشت:
با اعمال این معادله در هر یک از چهار گره، میتوانیم ضرایب a را بر حسب جابجاییهای گرهی u حل کنیم. این منجر به رابطه آشنای میشود، که در آن N بردار توابع شکل است.
۲. توابع شکل
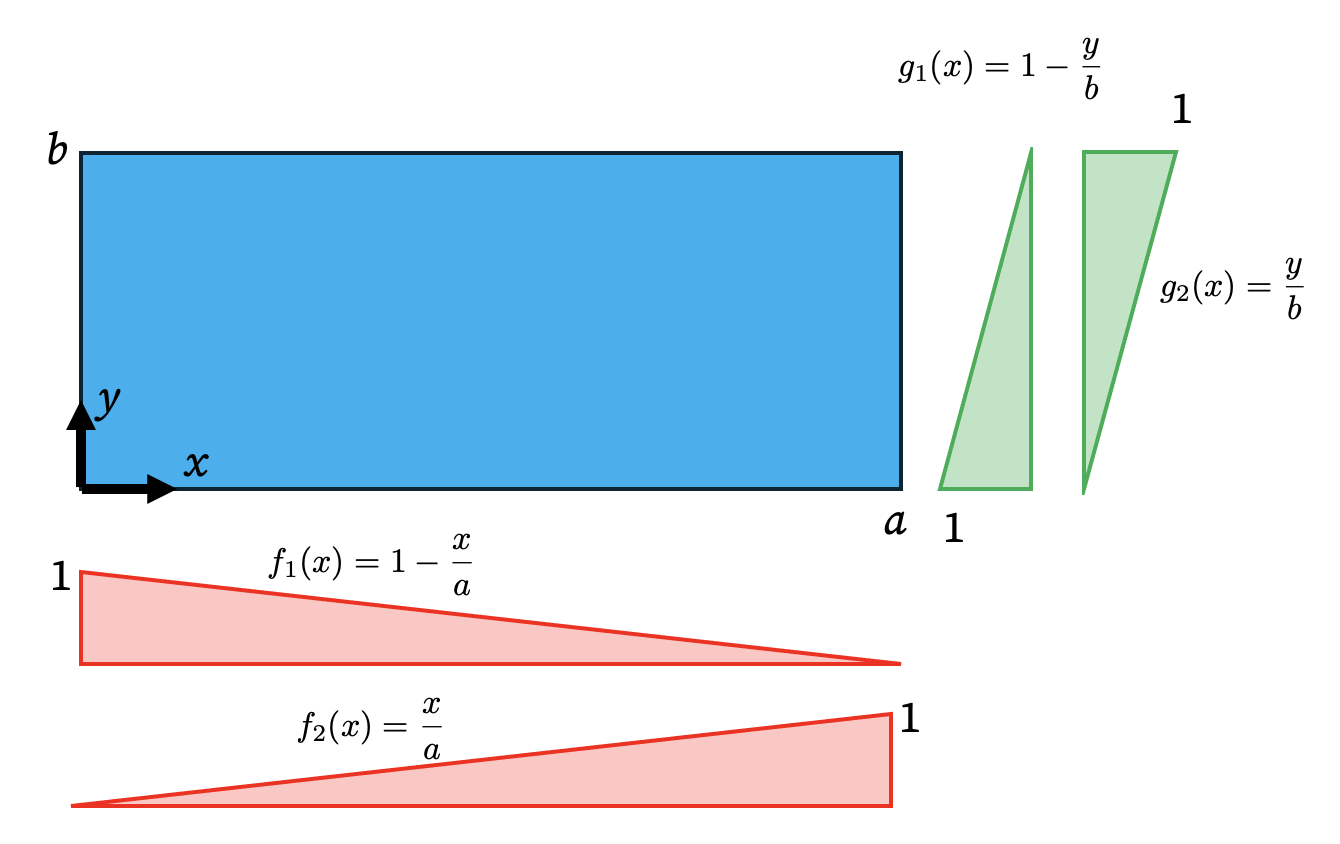
به جای وارونسازی ماتریسی مستقیم، توابع شکل برای یک المان مستطیلی را میتوان به طور ظریفی از طریق حاصلضرب توابع درونیابی خطی یکبعدی ساخت. یک مستطیل با ابعاد a و b را در نظر بگیرید. میتوانیم توابع خطی سادهای در هر راستا تعریف کنیم:
- در راستای x:
- در راستای y:
سپس توابع شکل دوبعدی با گرفتن حاصلضرب این توابع یکبعدی تشکیل میشوند. برای یک گره i، تابع شکل حاصلضرب توابع یکبعدی است که در آن گره برابر با ۱ هستند.
۳. ماتریس کرنش-جابجایی و سختی
از آنجایی که توابع شکل اکنون شامل جملات x و y هستند، مشتقات آنها دیگر ثابت نیستند. برای مثال، برای :
ماتریس B اکنون شامل جملاتی خواهد بود که توابعی از x و y هستند. این بدان معناست که کرنش، که توسط داده میشود، دیگر ثابت نیست در داخل المان. این میتواند به صورت خطی تغییر کند، که بهبود قابل توجهی نسبت به مثلث کرنش ثابت است.
ماتریس سختی المان با استفاده از فرمول استاندارد محاسبه میشود:
از آنجایی که ماتریس B تابعی از x و y است، انتگرالده دیگر ثابت نیست و انتگرالگیری باید به صورت صریح انجام شود.