اصل جابجاییهای مجازی برای یک سیستم از ذرات
اصل جابجاییهای مجازی را میتوان مستقیماً به اجسام صلب نیز تعمیم داد، که میتوان آنها را به عنوان سیستمهایی از ذرات در نظر گرفت. نیروهایی بین ذرات مختلف تشکیلدهنده جسم وجود خواهند داشت، به گونهای که فواصل بین ذرات ثابت باقی میمانند. با این حال، این نیروهای داخلی همواره به صورت جفتهای مساوی و خلاف جهت ظاهر میشوند، به طوری که کل کار انجامشده توسط آنها در حین هر حرکت کل جسم به عنوان یک جسم صلب برابر با صفر خواهد بود.
چارچوب صلب نشاندادهشده در شکل 1a را در نظر بگیرید که توسط یک پین بدون اصطکاک در نگه داشته شده و تحت تأثیر سه نیروی خارجی ، ، و قرار دارد که سیستم را در تعادل نگه میدارند.
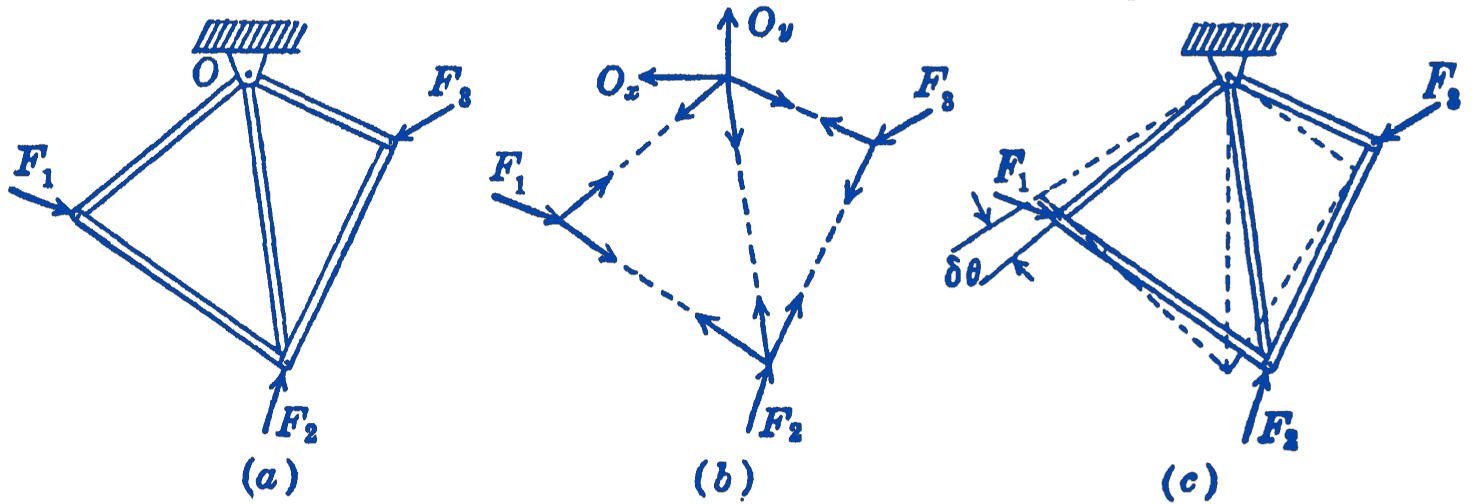
در شکل 1b، تمام نیروهای درگیر در سیستم نشان داده شدهاند. مشاهده میشود که آنها سه نوع هستند: اول، نیروهای خارجی فعال ، ، و ؛ دوم، نیروهای داخلی در میلههای صلب، که به صورت جفتهای مساوی و خلاف جهت ظاهر میشوند؛ و سوم، نیروی واکنش در پین ، که به صورت دو مؤلفه مستطیلی نشان داده شده است. حال، اگر جابجایی مجازی سیستم را تصور کنیم، همانطور که در شکل 1c نشان داده شده، که در آن کل چارچوب به اندازه زاویهای کوچک حول چرخیده است، خواهیم دید که نیروهای نوع دوم و سوم کاری انجام نمیدهند، چه سیستم در تعادل باشد یا نباشد، بنابر این برای شرط تعادل تنها نیاز به در نظر گرفتن نوع اول نیرو داریم و مینویسیم که در آن و تنها مؤلفههای نیروهای فعال هستند، و علامت مجموع نشان میدهد که تمامی این نیروهای فعال باید در نظر گرفته شوند. بنابراین میتوانیم به طور کلی برای هر سیستمی که شامل قیود بدون اصطکاک و میلههای صلب است، بیان کنیم که شرط لازم و کافی برای تعادل سیستم این است که کل کار انجامشده توسط تمام نیروهای فعال سیستم، در هر جابجایی بینهایت کوچک دلخواه سیستم که با قیود سازگار است، برابر با صفر باشد. این عمومیترین بیان اصل جابجاییهای مجازی است.
از مثالهای ارائهشده در بالا و آنهایی که در ادامه خواهد آمد، مشاهده خواهد شد که مزیت خاص اصل جابجاییهای مجازی در مسائلی تحقق مییابد که در آنها تنها به رابطه تعادلی بین نیروهای فعال سیستم علاقهمندیم و علاقهای به محاسبه مقادیر واکنشها یا نیروهای داخلی نداریم. این بدان معنا نیست که اصل جابجاییهای مجازی هرگز نمیتواند برای تعیین واکنشها استفاده شود. اغلب میتوان سیستم نیرویی را که باید تعیین شود به گونهای انتخاب کرد که نیروهای واکنشی بتوانند به عنوان نیروهای فعال در نظر گرفته شوند و بنابراین، بتوان با روشهای ذکرشده در بالا با آنها برخورد کرد.
مثال 1. یک میله صلب و بدون وزن به دو دیوار بدون اصطکاک تکیه داده شده است، همانطور که در شکل 2 نشان داده شده است. این میله توسط دو نیروی و موازی با دیوار در تعادل نگه داشته شده است. رابطه بین و در موقعیت نشاندادهشده چیست؟
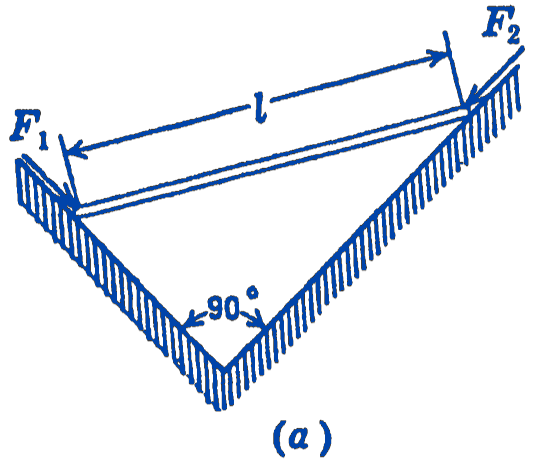
حل. یک جابجایی از سیستم سازگار با قیود در شکل 3 نشان داده شده است. از هندسه سیستم، داریم ، که در آن یک ثابت است؛ میتوانیم رابطه بین و را با مشتقگیری بیابیم:
بنابراین ما مستقیماً به رابطه بین و رسیدیم بدون اینکه واکنشهای و را در نظر بگیریم یا محاسبه کنیم. اگر مسئله را با معادلات تعادل قبلی خود حل میکردیم، میبایست و را در معادلات وارد میکردیم و سپس آنها را به صورت جبری حذف مینمودیم. با این حال، باید به خاطر داشت که در بسیاری از مسائل، حل برای واکنشها به همان اندازه نیروهای فعال مهم خواهد بود.
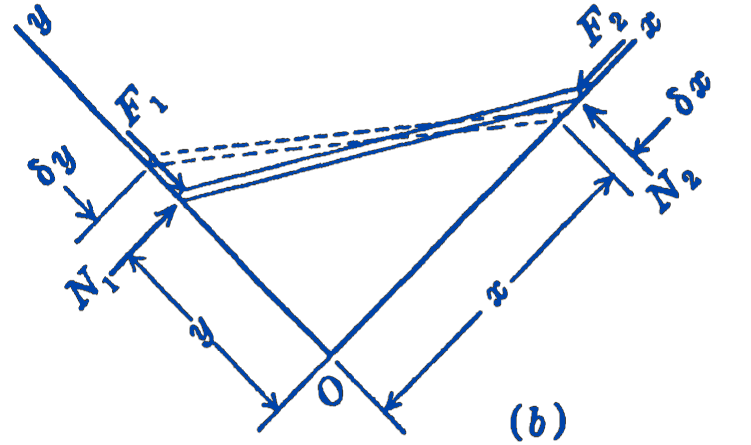
مثال 2. رابطه تعادلی بین نیروی ، ناشی از فشار گاز در سیلندر موتور، و گشتاور حول یاتاقان میللنگ را بیابید (شکل 4).
حل. نیروهای فعال در سیستم عبارتند از و نیروی عمود بر لنگ . یک جابجایی مجازی از سیستم در (c) نشان داده شده است که شامل چرخش لنگ حول و انتقال پیستون میباشد.
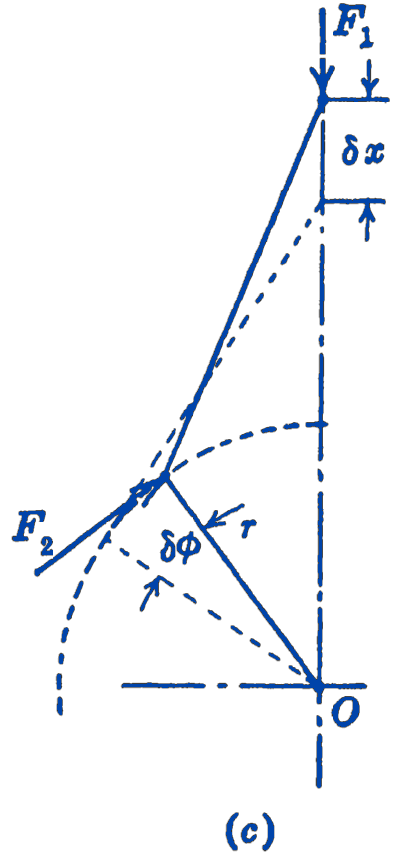
با استفاده از اصل جابجاییهای مجازی داریم:
مثال 3. یک نیروی فشاری با استفاده از یک پرس پیچی اعمال میشود، همانطور که در شکل 5 نشان داده شده است. پیچ توسط نیروی در فاصله از محور چرخانده میشود. گام رزوه پیچ است، که منظور از گام مسافتی است که رزوه پیچ در یک دور کامل پیچ پیشروی میکند. رابطه بین و را بیابید.
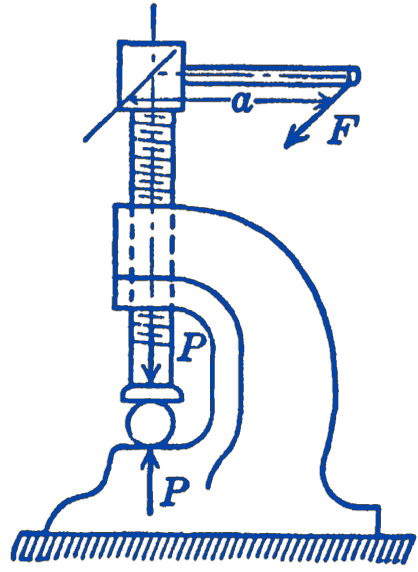
حل. ما یک چرخش کوچک پیچ را به عنوان جابجایی مجازی سیستم در نظر میگیریم. سپس پیچ به اندازه پیشروی خواهد کرد. از اصل جابجاییهای مجازی مستقیماً داریم:
مثال 4. یک وزنه باید توسط نیروی که به سیستم دو قرقره مساوی نشاندادهشده در شکل 6 اعمال میشود، بلند شود. رابطه بین و را برای شرایط تعادل بیابید.
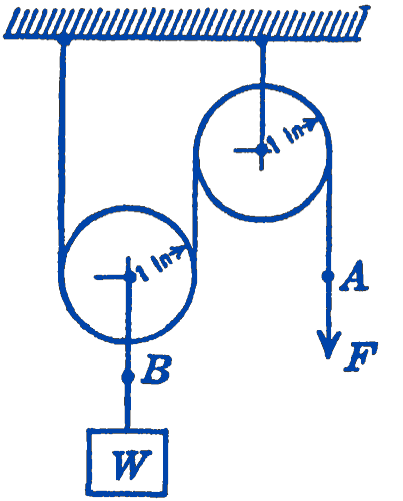
حل. به عنوان جابجایی مجازی سیستم، یک حرکت عمودی کوچک نقطه به سمت پایین، ، در نظر میگیریم. سپس نقطه به اندازه بالا برده خواهد شد و اصل جابجاییهای مجازی نتیجه میدهد: