منحنیها
فهرست مطالب
- 7.1 مقدمه
- 7.2 سخنرانی
- 7.2.1 منحنیهای پارامتری و مسیرهای آنها
- 7.2.2 سرعت و شتاب روی منحنیها
- 7.2.3 قضیه اساسی حسابان و منحنیها
- 7.2.4 بردارهای مماس، قائم و دو قائم
- 7.2.5 تکینگیهای انحنا و نرمی
- 7.2.6 تغییرات تقعر و بردارهای قائم
- 7.2.7 نکته جانبی: منحنیهای ماتریسمقدار
- 7.2.8 نکته جانبی: منحنیهای بسته ساده
- 7.2.9 نکته جانبی: بازپارامتریسازی با سرعت ثابت
- 7.2.10 نکته جانبی: پیچیدگیهای منحنیهای پیوسته
- 7.3 مثالها
- تمرینها
7.1 مقدمه
7.1.1 منحنیها در جبر خطی
بسیاری از اشیاء هندسی را میتوان یک بعد اختصاص داد. این عدد نشان میدهد که برای توصیف شیء به چند پارامتر نیاز داریم. یک نقطه دارای بعد ، یک خط دارای بعد ، و یک صفحه دارای بعد است. این در جبر خطی رسمیت یافته است. با توجه به یک ماتریس ، تعداد های پیشرو در بعد تصویر است. تعداد متغیرهای آزاد (ستونهای بدون پیشرو در ) بعد هسته است. برای مثال، برای که قبلاً به صورت ردیف کاهشیافته است، یک پیشرو و دو متغیر آزاد و داریم. معادله یک شیء دو بعدی، یک صفحه را توصیف میکند. اگر داده شوند، میتوانیم را از معادله پیدا کنیم. تصویر بردار ستونی خطی است که توسط این بردار گسترش یافته است. این خط بر صفحه عمود است و قضیه اساسی جبر خطی را نشان میدهد که تضمین میکند هسته بر تصویر عمود است یا به طور معادل هسته بر تصویر عمود است.
7.1.2 بعد و منحنیها
منحنیها اشیایی با بعد هستند. برای مثال، خط گسترشیافته توسط یک بردار به صورت مجموعه نقاط نوشته میشود. ما این را یک پارامتریسازی از خط مینامیم. متغیر آزاد زمان نامیده میشود. این تعیین میکند که در یک زمان ثابت در کجا قرار داریم. برای مثال در زمان در نقطه متناظر با بردار قرار داریم.1 بردار تفسیر سرعت را دارد. این به ما میگوید که با چه سرعتی روی خط حرکت میکنیم. البته، جایگزینی با همان خط را به ما میدهد اما سه برابر سریعتر حرکت میکنیم و سه برابر سریعتر به نقطه میرسیم.
7.1.3 کاوش منحنیها در فضا
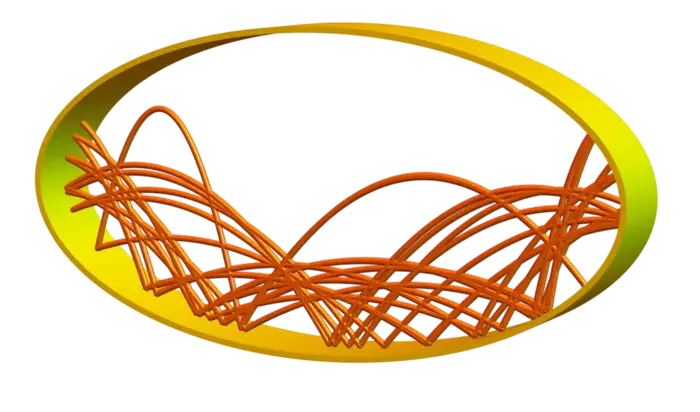
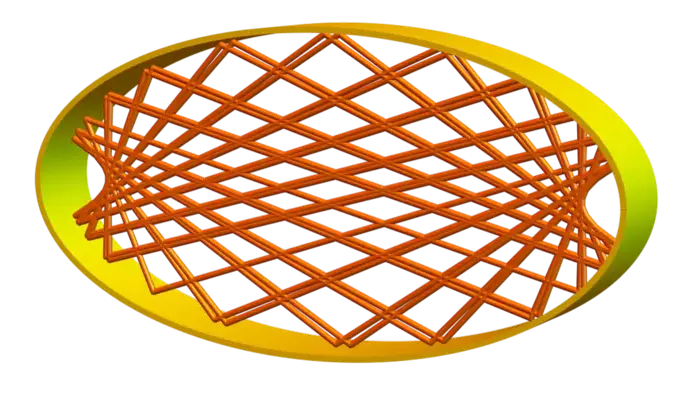
اگر سرعت بتواند جهت و طول را تغییر دهد، میتوانیم در مسیرهای جالبتری حرکت کنیم. چارچوب کار این است که سه تابع پیوسته را در نظر بگیریم و به مسیر در فضا نگاه کنیم. این را در نمادگذاری برداری به صورت مینویسیم. حالا، چون از نوشتن مداوم که نشان میدهد از بردارهای ستونی استفاده میکنیم خسته میشویم، فقط را مینویسیم. بیشتر اوقات، فرض میکنیم توابع مشتقپذیر هستند اما مورد یک توپ پینگپنگ که از روی میز جهش میکند نشان میدهد که منحنیهای غیرنرم نیز حتی در زندگی روزمره میتوانند مهم باشند. منحنیها میتوانند بسیار پیچیده باشند. یک توپ پینگپنگ را بردارید و آن را در یک ظرف بیضوی قرار دهید. مسیر بیلیاردی که ترسیم میکند آشوبناک است. در این سخنرانی به منحنیهایی که با پارامتریسازی داده میشوند نگاه میکنیم، یاد میگیریم که چگونه مشتق بگیریم تا سرعت یا شتاب را بدست آوریم. همچنین یاد میگیریم که چگونه انتگرال بگیریم. این به ما امکان میدهد مسیرها را محاسبه کنیم. برای مثال میتوانیم محاسبه کنیم که یک توپ در حال سقوط در یک میدان گرانشی در زمان کجاست.
7.2 سخنرانی
7.2.1 منحنیهای پارامتری و مسیرهای آنها
با توجه به تابع پیوسته از یک متغیر ، میتوانیم به تابع برداری نگاه کنیم. آن را یک منحنی پارامتری مینامیم. یک مثال است که خطی از نقطه و شامل بردار است.2 اگر در بازه پارامتر باشد، آنگاه تصویر برابر است که یک منحنی در را تعریف میکند. منحنی در نقطه شروع میشود و در نقطه پایان مییابد. یک مثال مهم دیگر دایره است، که در آن در بازه قرار دارد. تصویر آن یک دایره در صفحه است. پارامتریسازی حاوی اطلاعات بیشتری نسبت به خود منحنی است: منحنی سهموی تعریف شده روی برای مثال همان منحنی برای است، اما در پارامتریسازی دوم، منحنی با سرعت متفاوتی پیموده میشود. منحنیها در را میتوان در فضای فیزیکی ما تحسین کرد مانند که یک مارپیچ است. این منحنی خاص در مخروط قرار دارد.
7.2.2 سرعت و شتاب روی منحنیها
اگر توابع مشتقپذیر باشند، میتوانیم مشتق
7.2.3 قضیه اساسی حسابان و منحنیها
با توجه به تابع مشتق اول
قضیه 1. به طور یکتا از
اثبات. در هر مختصه داریم
یک حالت خاص زمانی است که
7.2.4 بردارهای مماس، قائم و دو قائم
با توجه به یک منحنی که برای آن سرعت
قضیه 2. در ، داریم
اثبات. این محاسبه را در کلاس انجام خواهیم داد. ◻
7.2.5 تکینگیهای انحنا و نرمی
حتی اگر کاملاً نرم باشد، انحنا میتواند بینهایت شود. بیایید به مثال نگاه کنیم. سپس
7.2.6 تغییرات تقعر و بردارهای قائم
حتی زمانی که کاملاً نرم است و هرگز صفر نیست، بردار قائم میتواند به صورت ناپیوسته به وابسته باشد. مثال: . اکنون
7.2.7 نکته جانبی: منحنیهای ماتریسمقدار
ما فقط به بردارهای پارامتری نگاه کردهایم. اگر درایههای یک ماتریس به زمان وابسته باشند، یک منحنی ماتریسمقدار داریم. این در معادلات دیفرانسیل، در مکانیک کوانتومی (عملگرهایی که در زمان حرکت میکنند) یا –مهمتر از همه– در تصاویر متحرک ظاهر میشود! یک فیلم فقط یک منحنی ماتریسمقدار است.
7.2.8 نکته جانبی: منحنیهای بسته ساده
یک منحنی صفحهای در صفحه که روی تعریف شده است یک منحنی بسته ساده نامیده میشود اگر باشد و هیچ مقادیر وجود نداشته باشد که برای آن . برای یک منحنی نرم، به این معنی که دو مشتق اول وجود دارند، میتوانیم به زاویه قطبی بردار
7.2.9 نکته جانبی: بازپارامتریسازی با سرعت ثابت
میتوانیم تأیید کنیم که هر منحنی پارامتری شده روی به طوری که
اثبات: به دنبال یک تابع یکنوا میگردیم بهطوری که مشتق طول داشته باشد. این یعنی میخواهیم
نتیجه بسیار شهودی است. میتوانید از به در طول منحنی ترسیمشده توسط رانندگی کنید فقط با حفظ سرعت . این پارامتریسازی جدید شما را به شما میدهد. بازه زمانی جدید شما خواهد بود که در آن طول کمان (طول سفر شما) است. در درس بعدی به محاسبه طول کمان خواهیم پرداخت.
7.2.10 نکته جانبی: پیچیدگیهای منحنیهای پیوسته
منحنیهای پیوسته میتوانند پیچیده باشند: اگر به ذره گرده در میکروسکوپ نگاه کنید، بهطور نامنظم روی منحنی حرکت میکند که در هیچ نقطهای مشتقپذیر نیست زیرا دائماً توسط مولکولهای هوا بمباران میشود که آن را به اطراف میجهانند. این حرکت براونی است. همچنین منحنیهای پئانو یا منحنیهای هیلبرت یا منحنیهای هیلبرت پرکننده فضا وجود دارند که هر نقطه از مکعب را میپوشانند. این منحنیها یک دوسویی پیوسته از به تعریف میکنند. (معکوس پیوسته نیست. با این حال، ساختار نشان میدهد که تعداد نقاط یکسانی در و وجود دارد).
7.3 مثالها
مثال 1. با فرض معادلات نیوتن
حل: داریم
مثال 2. فرض کنید . آنگاه
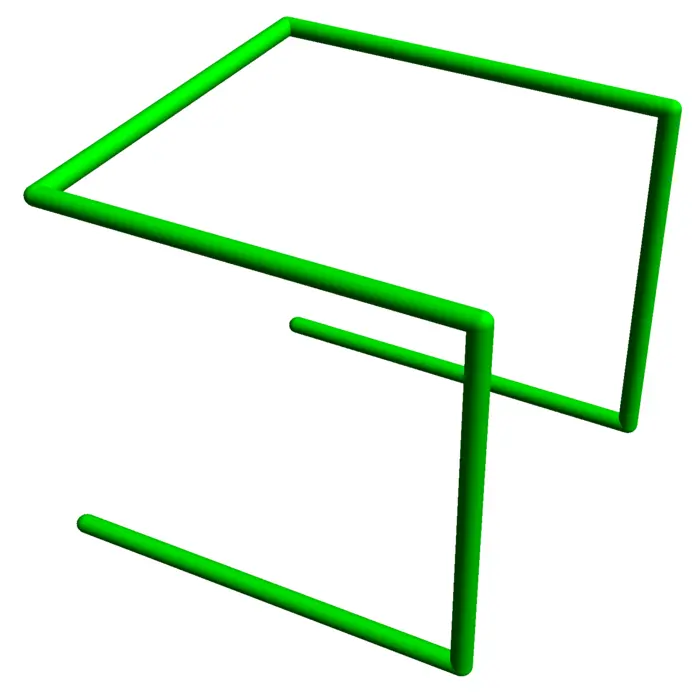
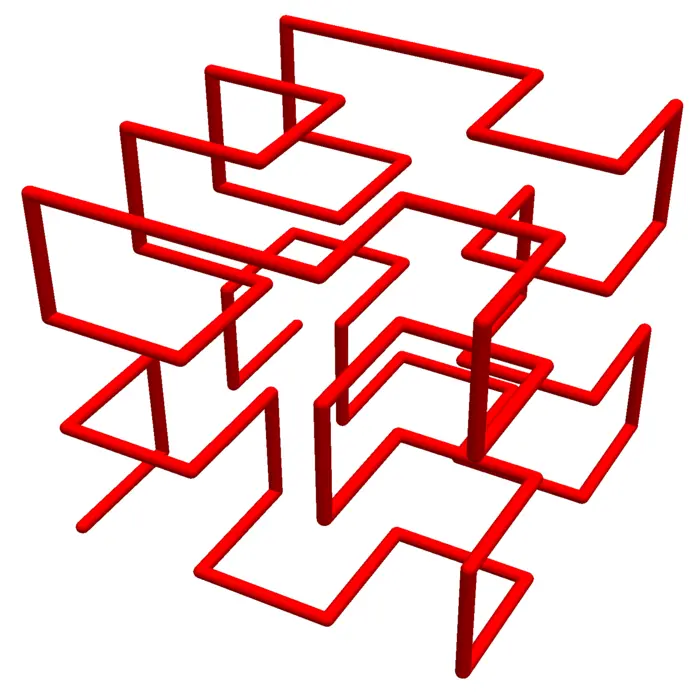
مثال 3. یک منحنی ساده بسته در یک گره است. برای هر عدد صحیح مثبت ، میتوانیم به گره چنبرهای نگاه کنیم انحنای کل یک گره به صورت تعریف میشود. به شکل (7.3) مراجعه کنید.3
تمرینها
تمرین 1. شما روی یک نیمکت در نزدیک چارلز یخزده بین وینتروپ و الیوت مینشینید و سنگهایی را به سمت ، نقطهای نزدیک دانشکده بازرگانی هاروارد، پرتاب میکنید. برای اینکه به دردسر نیفتید، فرض میکنیم همه چیز در تخیل ما اتفاق میافتد و سنگ بدون اصطکاک است. شما از یک تیرکمان استفاده میکنید و با سرعت اولیه
تمرین 2. میخواهیم یک لوگو برای یک شرکت جدید تولید کنیم و آزمایش کنیم. منحنی را رسم کنید و سرعت، شتاب و انحنا را در بیابید.
تمرین 3. منحنی را که از تقاطع استوانه با صفحه به دست میآید، پارامتری کنید.
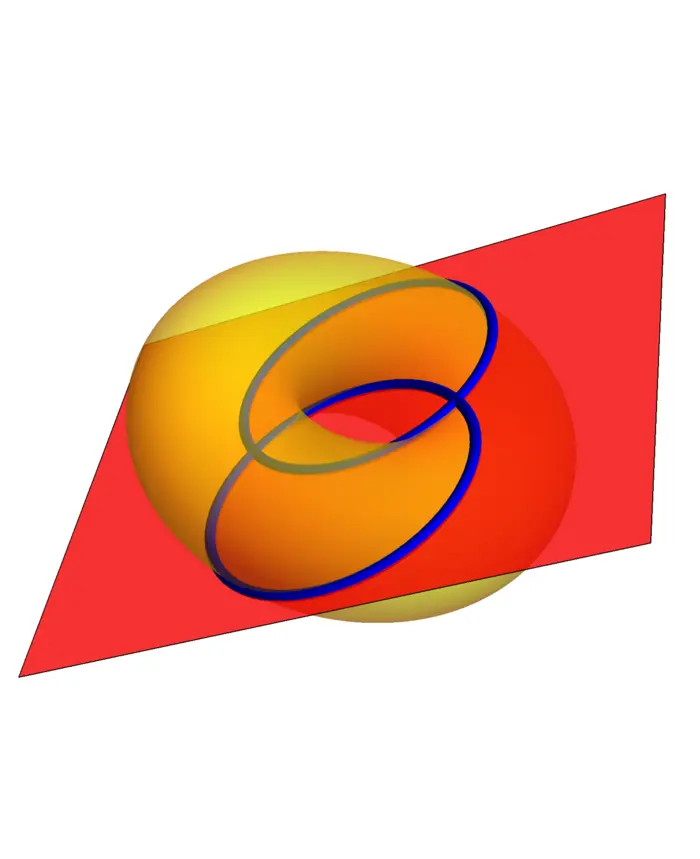
تمرین 4. تأیید کنید که گره چنبرهای روی چنبره قرار دارد.
تمرین 5. شما یک بیگل را به روشی غیراستاندارد برش میدهید. فرض کنید بیگل با داده شده است. تأیید کنید که اگر این چنبره را با صفحه قطع کنیم، آنگاه دایرههای ویلارسیو و همچنین دایره را به دست میآوریم.
