تعادل پایدار، ناپایدار و خنثی
برای سادگی، سیستمی را در نظر میگیریم که در وضعیت تعادل ساکن است و میتواند از آن وضعیت تعادل در هر دو جهت تنها از یک مسیر حرکت کند.
چنین سیستمی در شکل ۱ نشان داده شده است که در آن چهار پیکربندی تعادلی مختلف یک استوانه صاف نشان داده شده است.
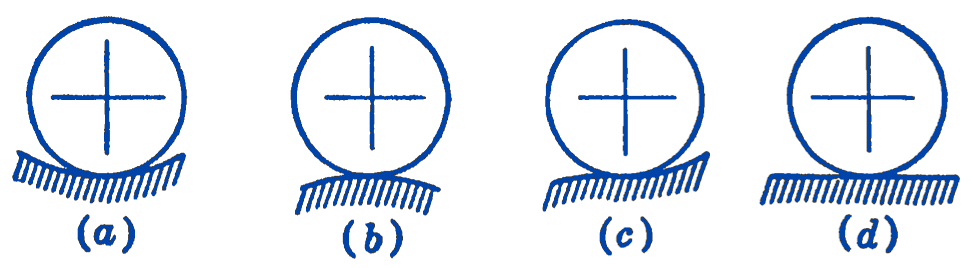
در (a) استوانه روی یک سطح مقعر قرار دارد؛ در (b) روی یک سطح محدب؛ در (c) روی یک نقطه عطف؛ و در (d) روی یک سطح صاف. با اعمال اصل جابهجاییهای مجازی، مشاهده خواهد شد که هر چهار وضعیت، وضعیتهای تعادلی هستند، زیرا تنها نیروی فعال یک نیروی گرانشی عمودی است و مرکز ثقل استوانه برای یک جابهجایی غلتشی بینهایت کوچک استوانه به صورت افقی حرکت میکند. همچنین میتوانیم این موقعیتها را به این واقعیت مرتبط کنیم که انرژی پتانسیل سیستم باید در وضعیت تعادل یک مقدار ایستا داشته باشد. در (a)، انرژی پتانسیل سیستم یک کمینه است، زیرا استوانه در پایینترین وضعیت خود قرار دارد و برای جابهجا کردن آن در هر جهت باید کار روی آن انجام شود. در (b) انرژی پتانسیل سیستم یک بیشینه است، زیرا استوانه در بالاترین وضعیت قرار دارد و سیستم هنگام جابهجایی در هر جهت کار انجام میدهد. نقطه عطف (c) متناظر با یک مقدار ایستا است، زیرا انرژی پتانسیل استوانه نه کمینه است و نه بیشینه.
همچنین تشخیص داده خواهد شد که وضعیتهای نشاندادهشده در شکل ۳-۱۱ از نظر فیزیکی تا حدودی متفاوت هستند. در (a)، میتوان گفت که تعادل پایدار داریم، زیرا هر حرکتی به دور از وضعیت تعادل نیروهایی ایجاد میکند که سیستم را به وضعیت تعادل بازمیگردانند. (b) و (c) نمونههایی از تعادل ناپایدار هستند، زیرا هر حرکتی به دور از وضعیت تعادل نیروهایی ایجاد میکند که سیستم را حتی بیشتر از وضعیت تعادل دور میکنند، و (d) تعادل خنثی یا بیتفاوت را نشان میدهد که در آن حرکت سیستم از وضعیت تعادل تأثیری بر تعادل سیستم ندارد.
بنابراین میتوان نتیجه گرفت که شرط بیشینه انرژی پتانسیل متناظر با وضعیت ناپایدار است، در حالی که شرط کمینه انرژی پتانسیل متناظر با وضعیت پایدار است.
ملاحظات فوق میتوانند برای آزمودن یک وضعیت تعادل از نظر پایدار یا ناپایدار بودن استفاده شوند. تنها کافی است توجه کنیم که انرژی پتانسیل سیستم با جابهجا شدن از وضعیت تعادل افزایش مییابد یا کاهش.
شرایط تعادل و آزمونهای تعادل پایدار و ناپایدار را میتوان به صورت تحلیلی به شکل زیر بیان کرد. فرض کنید برای سادگی سیستمی را در نظر میگیریم که جابهجایی آن از وضعیت تعادل را میتوان با یک مختصه، ، توصیف کرد. فرض کنید این وضعیت تعادل باشد و انرژی پتانسیل سیستم در وضعیت باشد. اکنون، با تغییر و دور شدن از وضعیت تعادل، انرژی پتانسیل یک سیستم پایستار تابعی از خواهد بود:
اگر اکنون بسط سری مکلورن این تابع را حول نقطه بنویسیم، داریم:
بر اساس قضیه جابهجاییهای مجازی، میدانیم که کار انجامشده توسط نیروها روی یک جابهجایی بینهایت کوچک دلخواه از نقطه صفر است، اگر نقطه یک وضعیت تعادل باشد. بنابراین، اگر یک جابهجایی بینهایت کوچک انتخاب کنیم، آنگاه متناظر برای تعادل صفر خواهد بود. شرط تحلیلی برای تعادل سیستم در نقطه بنابراین به صورت زیر درمیآید:
تغییر در انرژی پتانسیل سیستم، در ناحیه نزدیک وضعیت تعادل، آنگاه با عبارت زیر داده میشود:
زیرا جمله صفر است.
بنابراین با بررسی علامت مشتق دوم، تعیین میکنیم که انرژی پتانسیل با دور شدن از وضعیت تعادل افزایش مییابد یا کاهش، و در نتیجه سیستم پایدار است یا ناپایدار.
از ملاحظات فوق، میبینیم که در حالی که وضعیتهای تعادل را میتوان با استفاده از اصل جابهجاییهای مجازی و تنها با در نظر گرفتن جملات مرتبه اول جابهجاییهای کوچک تعیین کرد، برای تصمیمگیری در مورد پایداری یا ناپایداری وضعیت تعادل، بررسی جملات مرتبه دوم ضروری است.
| علامت | انرژی پتانسیل | وضعیت تعادل |
|---|---|---|
| کمینه | پایدار | |
| بیشینه | ناپایدار |
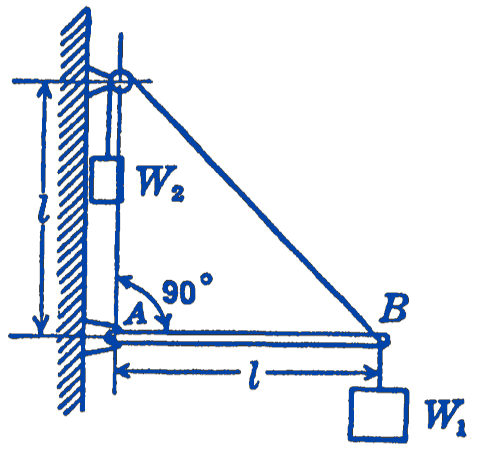
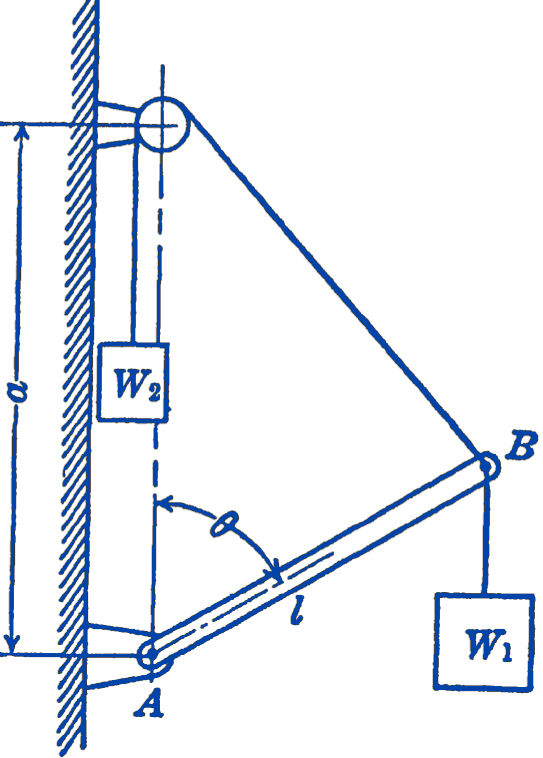
مثال ۱. وزنهای توسط یک میله صلب و بیوزن و یک کابل که وزنه به آن متصل است، نگهداشته میشود، همانطور که در شکل ۳-۱۲ نشان داده شده است. رابطه بین و را برای تعادل سیستم با میله در وضعیت افقی بیابید و تعیین کنید که آیا این وضعیت تعادل پایدار است یا ناپایدار.
راهحل. این مسئله را به دو روش حل خواهیم کرد، نخست با استفاده از اصل جابهجاییهای مجازی و دوم با استفاده از ملاحظات انرژی پتانسیل.
روش نخست
به عنوان جابهجایی مجازی سیستم، پایین آمدن کوچک وزنه را در نظر میگیریم که آن را مینامیم. سپس میتوانیم با استفاده از هندسه سیستم، فاصلهای را که بالا میرود، ، بیابیم.
این پاسخ را میتوان به سادگی با صفر قرار دادن مجموع گشتاورها حول نقطه برای تعادل بررسی کرد.
برای بررسی پایداری این وضعیت تعادل، باید ببینیم که برای جابهجا کردن سیستم از وضعیت تعادل باید روی آن کار انجام شود یا اینکه خود سیستم میتواند هنگام جابهجایی از وضعیت تعادل کار انجام دهد.
کار انجامشده توسط سیستم در طول جابهجایی از وضعیت تعادل برابر است با:
توجه کنید که تنها یک جمله مرتبه دوم باقی مانده است، بنابراین برای بررسی چنین مسائل پایداری، جملات مرتبه دوم باید حفظ شوند.
از آنجا که این جمله کار مثبت است، میبینیم که خود سیستم با جابهجایی از وضعیت تعادل کار انجام میدهد، یعنی انرژی پتانسیل کاهش مییابد، بنابراین وضعیت تعادل ناپایدار است.
روش دوم
عبارت انرژی پتانسیل سیستم را در ناحیهای نزدیک به وضعیت تعادل مینویسیم: که در آن جابهجایی رو به پایین از وضعیت تعادل است و انرژی پتانسیل سیستم در وضعیت تعادل است که از هر سطح دلخواهی اندازهگیری میشود.
شرط تعادل عبارت است از:
آزمون پایداری عبارت است از:
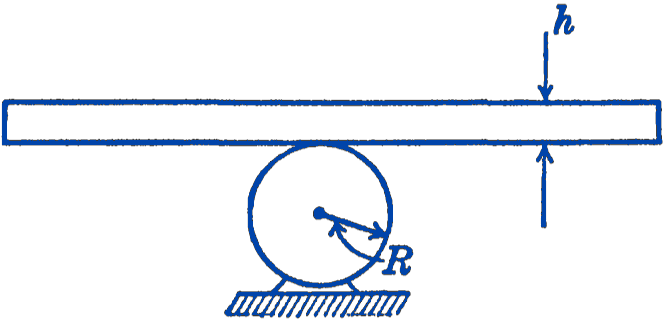
مثال ۲. یک تخته یکنواخت به ضخامت روی یک استوانه دایرهای به شعاع در حال تعادل است (شکل ۳). رابطه بین و برای پایداری وضعیت تعادل چیست، با این فرض که تخته بدون لغزش روی استوانه میغلتد؟
راهحل. یک جابهجایی مجازی از سیستم شامل تخته که روی استوانه میغلتد را در نظر بگیرید (شکل ۴).
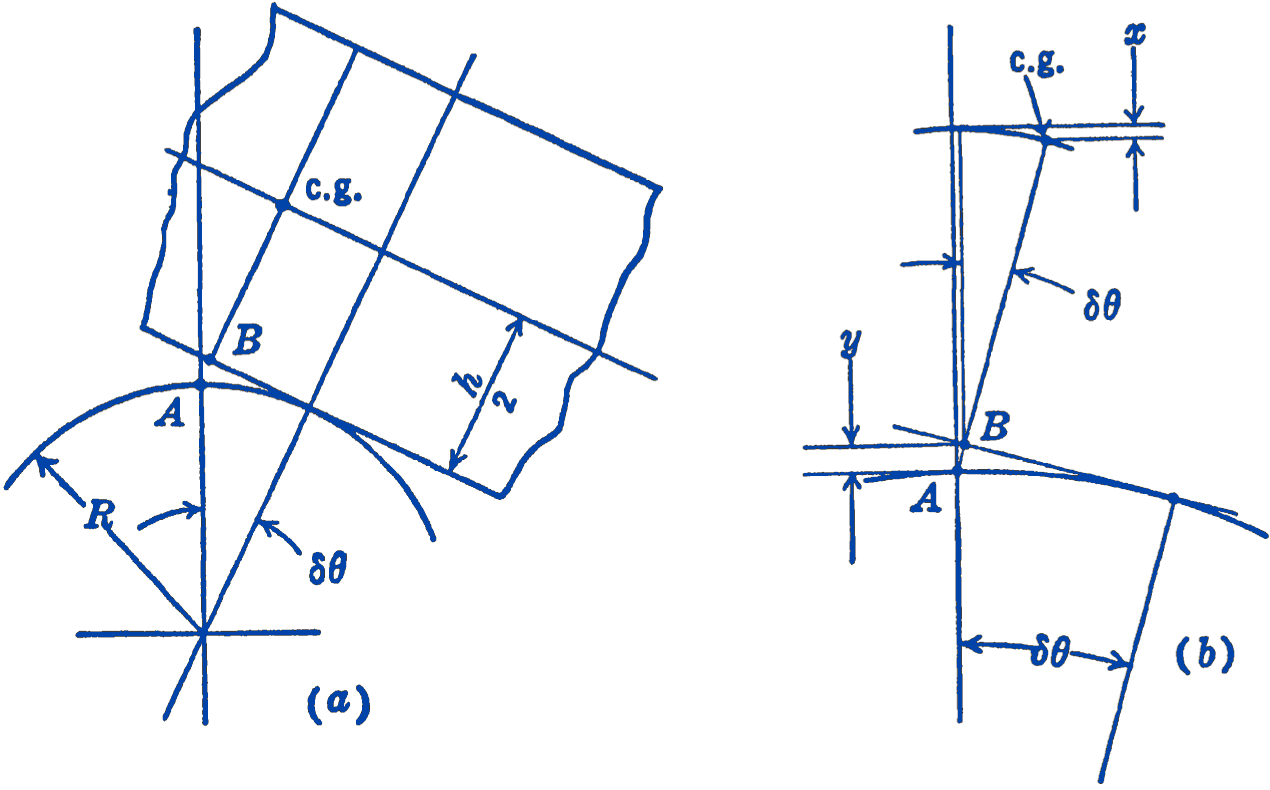
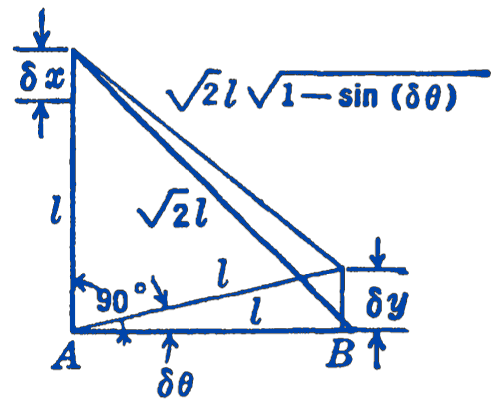
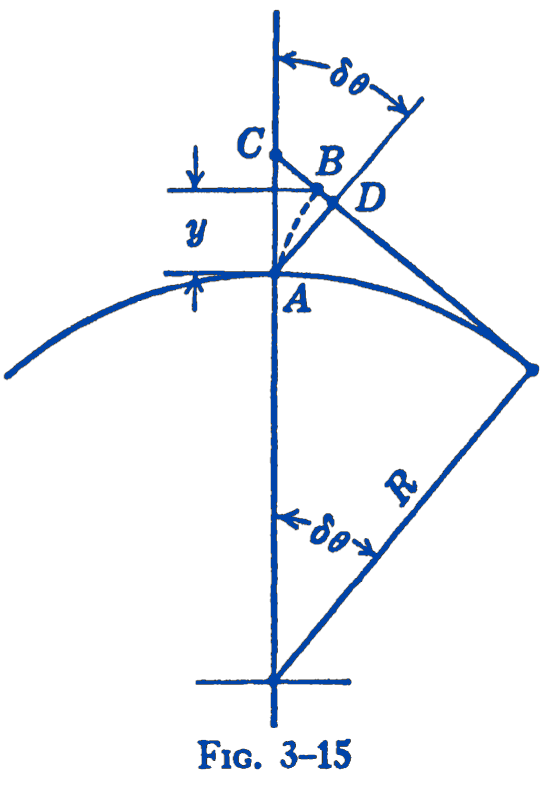
در ابتدا، نقاط و بر هم منطبق هستند؛ پس از جابهجایی مجازی، نقاط و موقعیتهای نشاندادهشده در نمودارها را به خود میگیرند. میخواهیم کل جابهجایی عمودی مرکز ثقل تخته را در طول جابهجایی محاسبه کنیم. اگر این جابهجایی عمودی رو به بالا باشد، وضعیت تعادل پایدار است. اگر این جابهجایی عمودی رو به پایین باشد، تعادل ناپایدار است. برای حل شرط حدی، رابطه بین و را بهدست میآوریم که در آن هیچ جابهجایی عمودی مرکز ثقل وجود نداشته باشد. در نمودار (b) مشاهده خواهد شد که کل حرکت عمودی را میتوان متشکل از دو بخش در نظر گرفت: یکی مؤلفه رو به پایین، ناشی از چرخش تخته، که در نمودار با مشخص شده است؛ و دیگری مؤلفه رو به بالا ناشی از غلتش تخته، که در نمودار با مشخص شده است. شرط حدی برای تعادل پایدار با برابر قرار دادن این دو مؤلفه تعیین خواهد شد.
از روی شکل، مستقیماً داریم: با حفظ جملات مرتبه دوم و صرفنظر کردن از مراتب بالاتر، داریم:
برای یافتن ، توجه کنید که در شکل ۵ طول کمتر از اما بزرگتر از مؤلفه عمودی است. با این حال میتوان نشان داد که تفاوت بین و ) تنها شامل جملات بالاتر از مرتبه دوم است، به طوری که اگر تنها جملات تا مرتبه دوم را حفظ کنیم میتوانیم بگوییم .
برای مثال، یک تخته به ضخامت به استوانهای با شعاع نیاز دارد. هر استوانه کوچکتر نمایانگر حالت تعادل ناپایدار خواهد بود.
3.6.1 مسائل
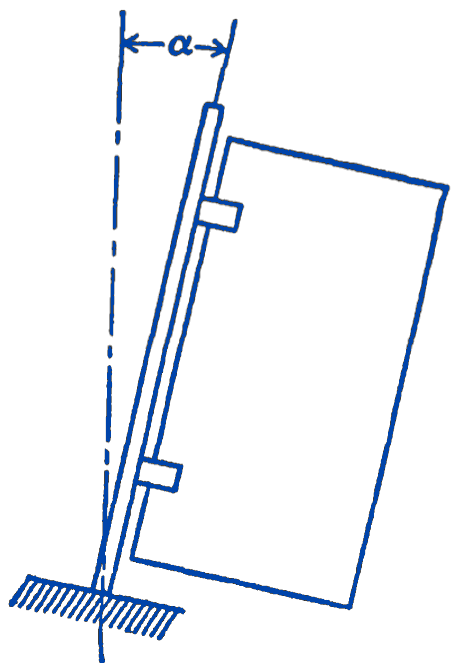
۱. یک در میتواند حول محوری که با خط قائم زاویه میسازد، به اندازه تاب بخورد، همانطور که در شکل نشان داده شده است. نشان دهید که سیستم دو وضعیت تعادل دارد، یکی پایدار و دیگری ناپایدار.
۲. با ارجاع به مسئله قبل، تعیین کنید که آیا وضعیت تعادل میله یکنواخت پایدار است یا ناپایدار.
پاسخ
ناپایدار
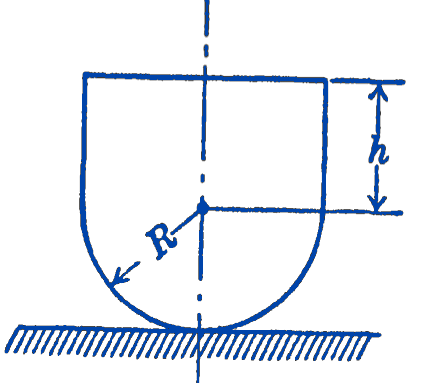
۳. یک جسم همگن از یک نیماستوانه و یک مکعبمستطیل تشکیل شده است، همانطور که در شکل نشان داده شده است. بیشینه مقدار را که با پایداری سیستم روی صفحه افقی سازگار است بیابید. فرض میشود استوانه بدون لغزش روی صفحه میغلتد.
پاسخ
۴. یک میله صلب بیوزن وزنه را نگه میدارد و خود توسط کابلی که وزنه به آن متصل است نگهداشته میشود، همانطور که در شکل نشان داده شده است. فاصله بزرگتر از فاصله است. تمام وضعیتهای تعادل ممکن سیستم را بیابید و پایداری آنها را بررسی کنید.
پاسخ
،