Deformaciones propias y esfuerzos residuales
En mecánica de sólidos, a menudo encontramos deformaciones no elásticas. Ejemplos de deformaciones no elásticas incluyen:
Expansión térmica: Cambios reversibles en volumen o forma impulsados por un aumento o disminución de temperatura.
Deformaciones plásticas: Deformaciones permanentes e irreversibles que permanecen después de que se eliminan las cargas que inducen fluencia (a menudo debido al movimiento de un tipo de defecto unidimensional, llamado dislocaciones).
Deformaciones iniciales:
Las deformaciones iniciales representan el estado de deformación que ya existe en un material antes de que se apliquen nuevas cargas externas o se realicen análisis actuales. Generalmente encontramos deformaciones iniciales como resultado de la historia de fabricación o procesamiento de un material. En lugar de simular toda la historia de cómo se fabricó una pieza, los ingenieros tratan la deformación remanente como una "deformación inicial" de referencia.Deformaciones de desajuste:
Las deformaciones de desajuste ocurren a microescala cuando una partícula extraña o una nueva fase se forma dentro de un material anfitrión, pero su tamaño geométrico natural o espaciado de red no coincide perfectamente con la red atómica circundante. Debido a que los dos materiales están unidos entre sí, se ven forzados a estirarse o comprimirse para ajustarse mutuamente.- Ejemplo: En el aluminio endurecido por precipitación (como el aluminio usado en aeronaves), los átomos de cobre se agrupan para formar diminutos "precipitados" dentro de la red de aluminio. El espaciado cristalino natural de estos precipitados ricos en cobre es ligeramente diferente de la matriz de aluminio circundante. La diferencia puramente geométrica entre el tamaño natural del precipitado y el "hueco" que ocupa en la matriz de aluminio es la deformación de desajuste. Otro ejemplo clásico es el dopaje en semiconductores, donde la sustitución de un átomo más grande (como el fósforo) en una red de silicio crea una deformación de desajuste local.
Toshio Mura generalmente se refirió a estas deformaciones no elásticas como eigenstrains. J.D. Eshelby (1957) originalmente las denominó "deformaciones libres de tensión". Algunos investigadores también las llaman "deformaciones intrínsecas". En este texto, utilizaremos la terminología de Mura y denotaremos el tensor de eigenstrain por .
Cuando se desarrollan eigenstrains localizadas dentro de un cuerpo, el principio de compatibilidad del continuo dicta que el material no puede desgarrarse físicamente ni solaparse. Como resultado, el material circundante se ve forzado a estirarse, comprimirse o doblarse para acomodar la deformación y asegurar un ajuste perfecto. Las tensiones internas requeridas para mantener esta compatibilidad forzada se denominan eigenstresses. Debido a que no se aplican fuerzas externas, este estado de tensión interno debe equilibrarse perfectamente en toda la pieza, siendo autoequilibrado. En la práctica de la ingeniería, estas tensiones internas autoequilibradas, que suelen resultar de procesos de fabricación o fluencia plástica, se conocen más comúnmente como tensiones residuales.
(Nota: El prefijo "eigen" proviene del alemán y significa "propio" o "inherente". Es importante aclarar que los eigenstrains y eigenstresses no tienen absolutamente nada que ver con los autovalores matemáticos de los tensores de deformación o tensión. Como hemos discutido, esos autovalores representan las deformaciones principales y las tensiones principales, que son las deformaciones normales o tensiones en un sistema de coordenadas específico donde los componentes de corte son cero. Observe que en materiales anisotrópicos, estos dos sistemas de coordenadas no necesariamente se alinean.)
Ejemplo de un Eigenstrain
Supongamos que la temperatura de una inhomogeneidad (región Ω) encerrada por un bloque de material más grande y sin restricciones aumenta en ΔT. La inhomogeneidad "quiere" expandirse. Si estuviera completamente libre y no adherida, experimentaría una deformación térmica puramente libre de tensiones. Para un material isótropo, este eigenstrain se escribe como:
donde α es el coeficiente de expansión térmica y δij es la delta de Kronecker (que vale 1 si i = j, y 0 si i ≠ j). Esto supone que la expansión es uniforme en todas las direcciones normales. Si el material es anisotrópico, la expansión depende de la orientación, y αδij se reemplaza por un tensor de expansión térmica general αij.
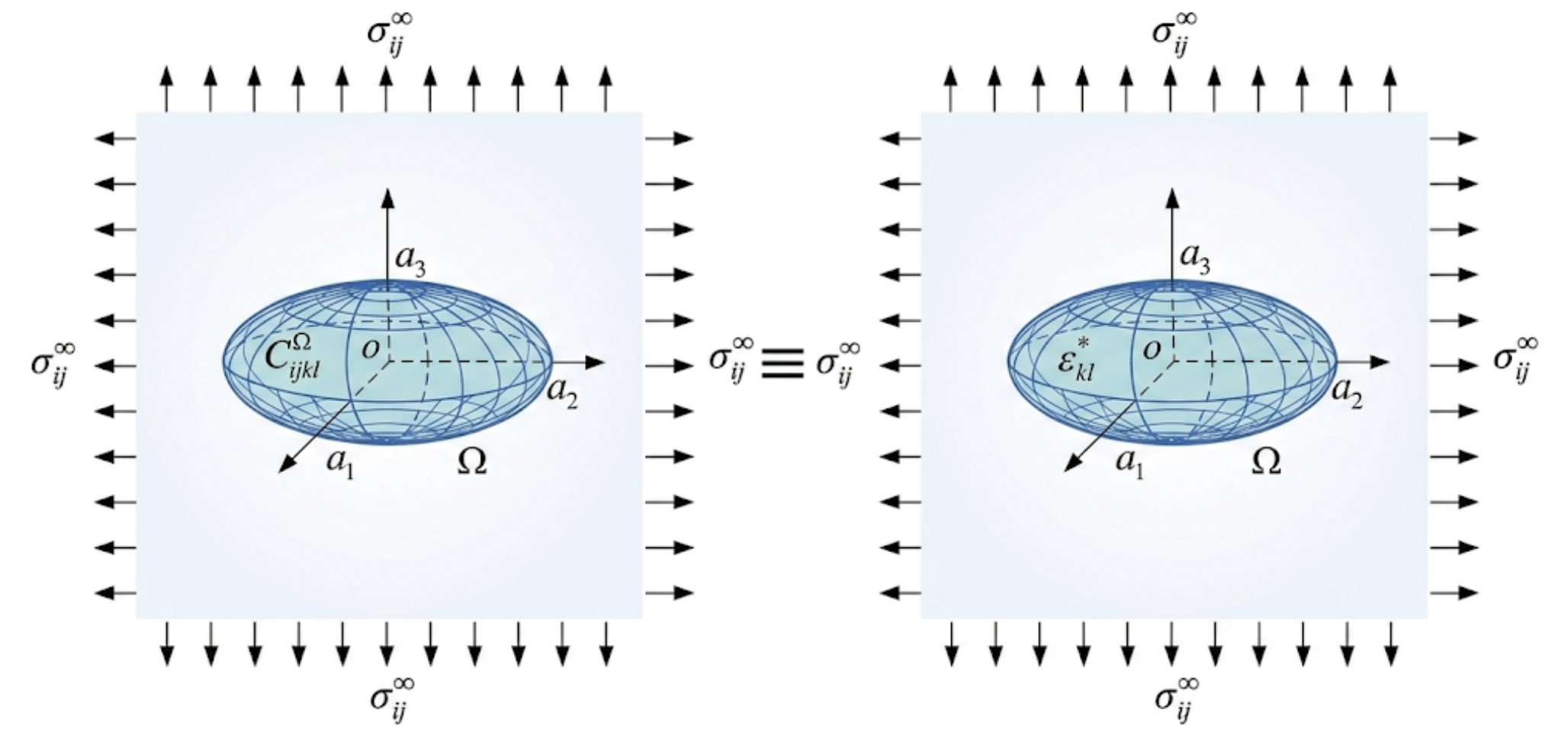
Eigenstrains Ficticios (Método de Inclusión Equivalente)
Es importante señalar que los eigenstrains no siempre son deformaciones físicas literales; también pueden emplearse como una herramienta matemática altamente efectiva. En micromecánica, los ingenieros analizan con frecuencia inhomogeneidades, regiones dentro de un material que poseen una rigidez elástica diferente a la de la matriz circundante. Calcular el campo de tensiones alrededor de estos materiales con diferencias de rigidez bajo una carga externa aplicada es matemáticamente engorroso. Sin embargo, J.D. Eshelby (1957) demostró una solución ingeniosa: podemos reemplazar matemáticamente la partícula "extraña" por el material anfitrión original, siempre que introduzcamos un eigenstrain ficticio puramente teórico (a menudo llamado eigenstrain equivalente) en esa región. Este eigenstrain ficticio se calcula con precisión de modo que los campos de tensiones y deformaciones resultantes coincidan perfectamente con la realidad de la partícula rígida. Este salto conceptual, conocido como Método de Inclusión Equivalente[1], es una piedra angular de la mecánica de compuestos porque permite a los investigadores resolver problemas complejos de múltiples materiales utilizando las ecuaciones mucho más simples de un material uniforme y homogéneo.
La Descomposición de la Deformación
Al tratar con deformaciones infinitesimales, la deformación total 𝜖ij se puede descomponer aditivamente en la deformación elástica y el eigenstrain :
Es crucial distinguir entre estas tres deformaciones:
Deformación total (𝜖ij): Esta es la deformación geométrica física real del material. Debido a que el material debe permanecer continuo (sin desgarros ni solapamientos), la deformación total debe ser compatible. Esto significa que se deriva directamente de un campo de desplazamiento continuo ui:
Eigenstrain (𝜖*ij): El cambio de forma inherente y libre de tensiones que el material quiere experimentar.
Deformación elástica (𝜖ijel): La deformación debida a fuerzas aplicadas o tensiones internas.
Ley de Hooke con Eigenstrains
En un material elástico lineal, el tensor de tensiones es una función lineal de la deformación elástica. Por lo tanto, tenemos
donde Cijkl es el tensor de rigidez de cuarto orden.
Sustituyendo la descomposición de la deformación en esta ecuación se obtiene la relación entre tensión, deformación total y eigenstrain:
- Utilizando notación de índices donde la suma sobre los índices repetidos k y l está implícita, las ecuaciones anteriores en mecánica de sólidos se escriben como:
Referencias
Eshelby, J. D. (1957). La determinación del campo elástico de una inclusión elipsoidal y problemas relacionados. Proceedings of the Royal Society of London. Series A. Mathematical and Physical Sciences, 241(1226), 376–396. https://doi.org/10.1098/rspa.1957.0133
Korsunsky, A. M. (2017). Un ensayo didáctico sobre tensiones residuales y eigenstrains. Butterworth-Heinemann.
Mura, T. (1987). Micromecánica de defectos en sólidos (2ª ed. rev.). Springer.