Elementos Viga
Los elementos viga son componentes fundamentales en el análisis estructural, diseñados para modelar miembros que resisten cargas principalmente mediante flexión. A diferencia de los elementos de celosía, que solo manejan fuerzas axiales, los elementos viga pueden soportar cargas transversales, las cuales inducen fuerzas cortantes internas y momentos flectores.
1. Fundamento Teórico: Teoría de Vigas de Euler-Bernoulli
La formulación para un elemento viga “clásico” estándar se basa en la teoría de vigas de Euler-Bernoulli. Esta teoría proporciona las relaciones cinemáticas esenciales que vinculan la deformación del elemento con sus deformaciones internas. La teoría se construye sobre varias suposiciones clave:
- Las Secciones Planas Permanecen Planas y Perpendiculares: Esta es la suposición más crítica. Establece que una sección transversal que inicialmente es plana y perpendicular al eje central de la viga permanecerá plana y perpendicular a ese eje después de que la viga se deforme. Una consecuencia importante de esto es que la deformación por cortante se considera despreciable.
- Pequeños Desplazamientos y Rotaciones: Se asume que las deflexiones y pendientes de la viga son pequeñas. Esto permite aproximaciones lineales, simplificando significativamente las matemáticas.
- Material Elástico Lineal: Se asume que el material de la viga es isótropo y obedece la Ley de Hooke, lo que significa que la tensión es directamente proporcional a la deformación.
A partir de estas suposiciones, derivamos la ecuación más importante para nuestra formulación. Esta ecuación conecta la flexión física de la viga con la deformación interna experimentada por sus fibras materiales.
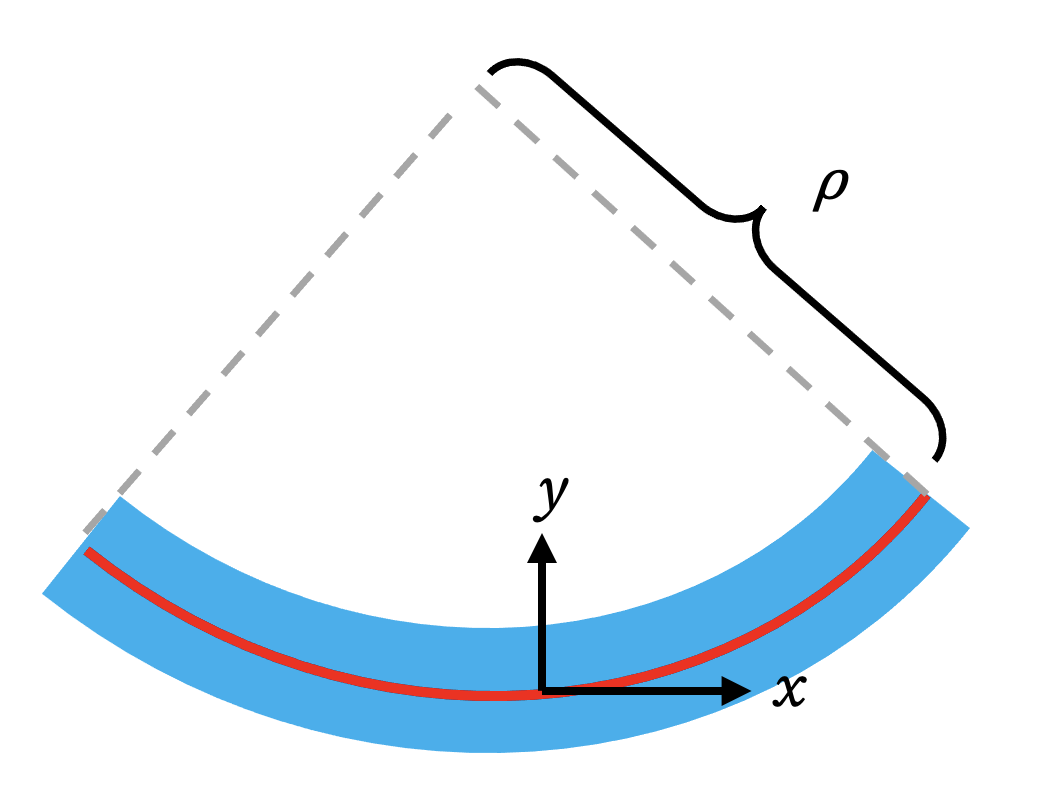
Para entender esto, imagine la viga flexionándose en un arco suave. En cualquier punto a lo largo de su longitud, podemos aproximar este arco con un círculo de “mejor ajuste”. El radio de este círculo se denomina radio de curvatura, denotado por ρ (rho).
- Una flexión muy suave y ligera corresponde a un círculo con un radio muy grande, por lo que ρ es grande.
- Una flexión aguda y cerrada corresponde a un círculo con un radio pequeño, por lo que ρ es pequeño.
Ahora, considere la deformación en una fibra a una distancia y del eje neutro de la viga (que se encuentra a lo largo del centro de este círculo). Basado en la geometría del arco, la deformación axial (εxx) está dada por:
Esta relación simple y poderosa muestra que la deformación es cero en el eje neutro (y=0), y aumenta linealmente a medida que nos alejamos de él.
Por conveniencia matemática en mecánica estructural, es común trabajar con una cantidad llamada curvatura, denotada por κ (kappa) (ver aquí). La curvatura es simplemente el recíproco del radio de curvatura: Esto significa que una flexión suave (ρ grande) tiene una curvatura pequeña, mientras que una flexión aguda (ρ pequeño) tiene una curvatura grande. Usando esta definición, nuestra ecuación de deformación se convierte en:
El paso crucial final es relacionar esta curvatura física con la función de desplazamiento transversal de la viga, v(x). Para las pequeñas deflexiones asumidas en la teoría de Euler-Bernoulli, existe una aproximación matemática directa:
Combinando estas relaciones obtenemos la ecuación final y esencial que vincula la deformación interna con la segunda derivada del campo de desplazamientos. Esta es la ecuación que forma la base de nuestra derivación de elementos finitos:
2. Definición del Elemento y Grados de Libertad (DOFs)
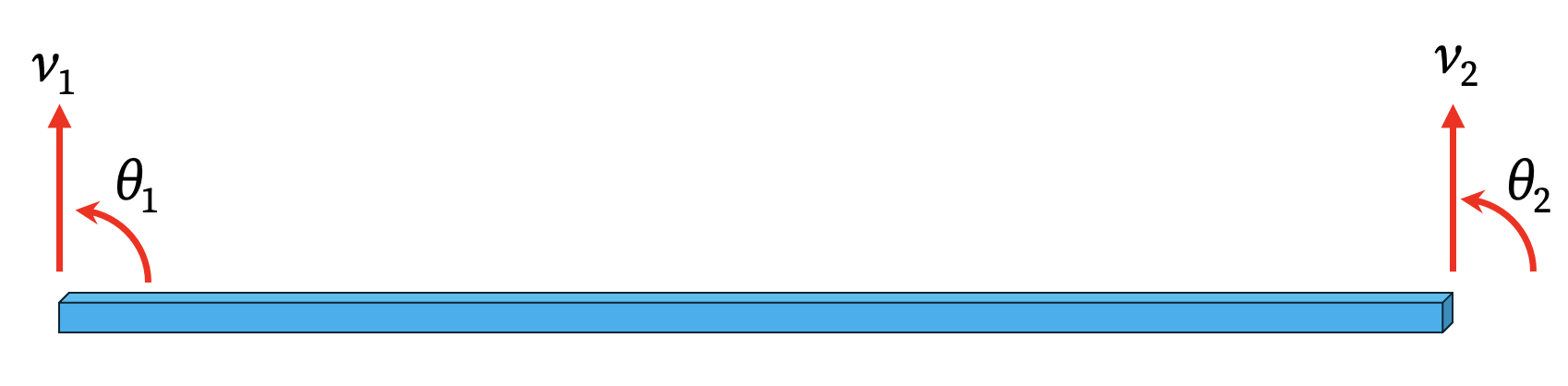
Para capturar el comportamiento de flexión, definimos un elemento viga de dos nodos. Cada nodo requiere dos grados de libertad (DOFs) para describir su estado:
- Un desplazamiento transversal,
v. - Una rotación,
θ.
Para ángulos pequeños, la rotación es igual a la pendiente de la curva de desplazamiento, por lo que θ = dv/dx.
Esto significa que un solo elemento viga tiene un total de cuatro grados de libertad. Estos se agrupan en el vector de desplazamiento nodal generalizado del elemento, q:
3. El Campo de Desplazamientos y la Necesidad de las Funciones de Forma de Hermite
El núcleo del método de los elementos finitos es aproximar el campo de desplazamientos continuo v(x) utilizando un número finito de parámetros nodales. Una función lineal simple es insuficiente porque su segunda derivada es siempre cero, lo que implica curvatura nula y, por lo tanto, deformación por flexión nula.
El polinomio más simple que puede representar una curvatura no nula y variable es un polinomio cúbico, que tiene cuatro coeficientes desconocidos (a₀ a a₃). Esto coincide convenientemente con nuestros cuatro grados de libertad nodales.
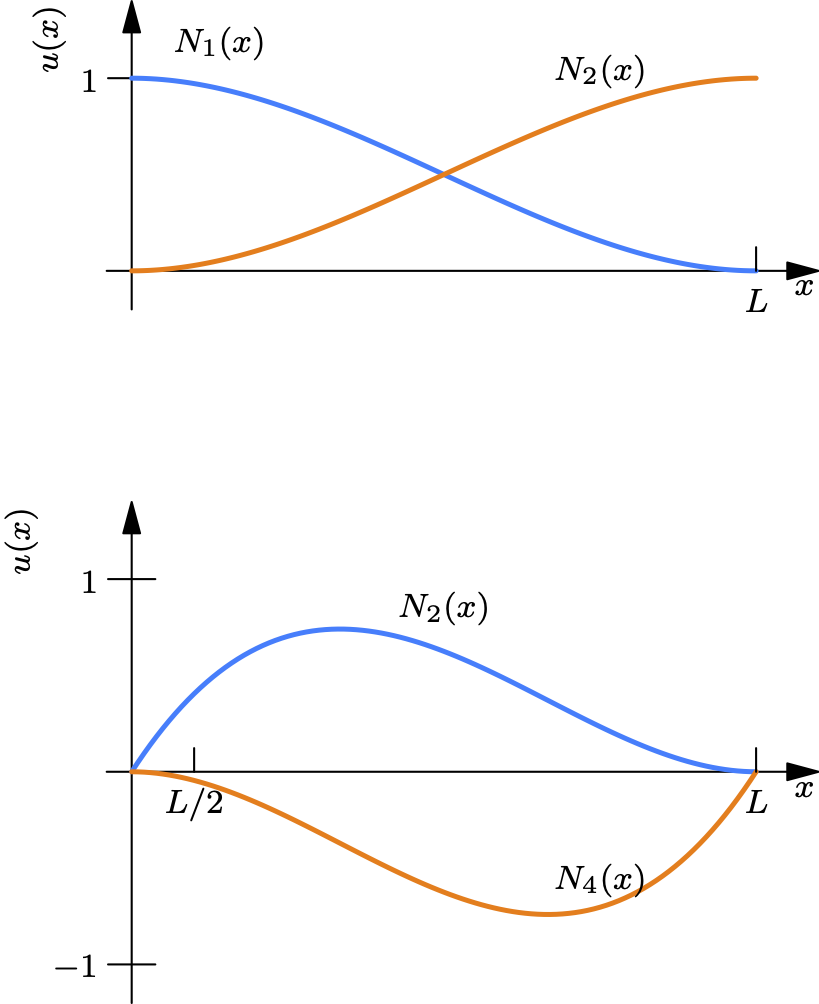
Si bien podríamos trabajar con los coeficientes a_i, es mucho más efectivo formular el problema utilizando funciones de forma que relacionen directamente el desplazamiento v(x) con los grados de libertad nodales en el vector q. Las funciones de forma específicas utilizadas para esto se denominan Polinomios de Hermite.
A diferencia de las funciones de forma de Lagrange más simples que solo interpolan valores, las funciones de forma de Hermite interpolan tanto los valores como sus primeras derivadas en los nodos. Esto es exactamente lo que necesitamos para manejar tanto el desplazamiento (v) como la rotación (θ = dv/dx). La consecuencia más importante es que los polinomios de Hermite garantizan continuidad C¹ entre elementos adyacentes, asegurando que la pendiente sea continua a través de los nodos y que la forma deformada sea suave.
4. Derivación Paso a Paso de las Funciones de Forma de Hermite
Derivaremos las cuatro funciones de forma, N₁(x) a N₄(x), tales que:
Cada se obtiene asumiendo y resolviendo para cuatro coeficientes tales que y todos los demás grados de libertad () son cero.
Derivemos N₁(x) encontrando un polinomio cúbico único que corresponda a un desplazamiento unitario en el nodo 1 (v₁=1) mientras todos los demás grados de libertad nodales son cero.
Paso 1: Definir las Condiciones Nodales para N₁(x) La función debe satisfacer: 1. N₁(0) = 1 (Desplazamiento unitario en el nodo 1) 2. N₁'(0) = 0 (Pendiente cero en el nodo 1) 3. N₁(L) = 0 (Desplazamiento cero en el nodo 2) 4. N₁'(L) = 0 (Pendiente cero en el nodo 2)
Paso 2: Aplicar Condiciones a un Polinomio Cúbico General Sea N₁(x) = a x³ + b x² + c x + d. Su derivada es N₁'(x) = 3a x² + 2b x + c.
Aplicar las cuatro condiciones: 1. N₁(0) = 1 => a(0) + b(0) + c(0) + d = 1 => d = 1 2. N₁'(0) = 0 => 3a(0) + 2b(0) + c = 0 => c = 0 3. N₁(L) = 0 => aL³ + bL² + 0*L + 1 = 0 => aL³ + bL² = -1 4. N₁'(L) = 0 => 3aL² + 2bL + 0 = 0 => 3aL² + 2bL = 0
Paso 3: Resolver para los Coeficientes a y b De la condición (4), obtenemos b = - (3/2)aL. Sustituyendo esto en la condición (3): aL³ + (-3/2 * aL)L² = -1 aL³ - 3/2 * aL³ = -1 -1/2 * aL³ = -1 => a = 2/L³
Ahora encontramos b: b = -3/2 * (2/L³) * L => b = -3/L²
Paso 4: Ensamblar la Función de Forma N₁(x) Sustituir los coeficientes a, b, c, d de vuelta en la forma polinomial:
Siguiendo el mismo procedimiento para los otros tres casos unitarios, derivamos las cuatro funciones de forma de Hermite.
5. Derivación de la Matriz de Rigidez del Elemento
El paso final es utilizar estas funciones de forma para derivar la matriz de rigidez del elemento a partir de la integral fundamental:
1. Definir la Matriz B: La deformación es y . La curvatura d²v/dx² es:
2. Plantear la Integral de Rigidez: El diferencial de volumen es dV = dA dx. Para un estado de tensión 1D, la matriz de elasticidad E es simplemente el Módulo de Young, E. Sustituyendo la expresión para B: A) pueden moverse fuera de la integral interna:
3. El Resultado Final: Reconocemos que el término es la definición del segundo momento de área, I. Esto simplifica enormemente la integral: Evaluando las segundas derivadas de las cuatro funciones de forma de Hermite, formando los productos matriciales e integrando con respecto a x desde 0 hasta L se obtiene finalmente la clásica matriz de rigidez de viga de Euler-Bernoulli de 4x4:
Viga con Orientación Arbitraria y Matriz de Transformación
Si consideramos 6 grados de libertad (considerando un elemento viga-columna), en el cual la viga también puede ser estirada o comprimida, entonces la matriz de rigidez del elemento es

Ahora consideremos una viga que forma un ángulo con el eje global. En este caso, debemos rotar el sistema de coordenadas global (x, y) un ángulo para alcanzar el sistema local (x', y').
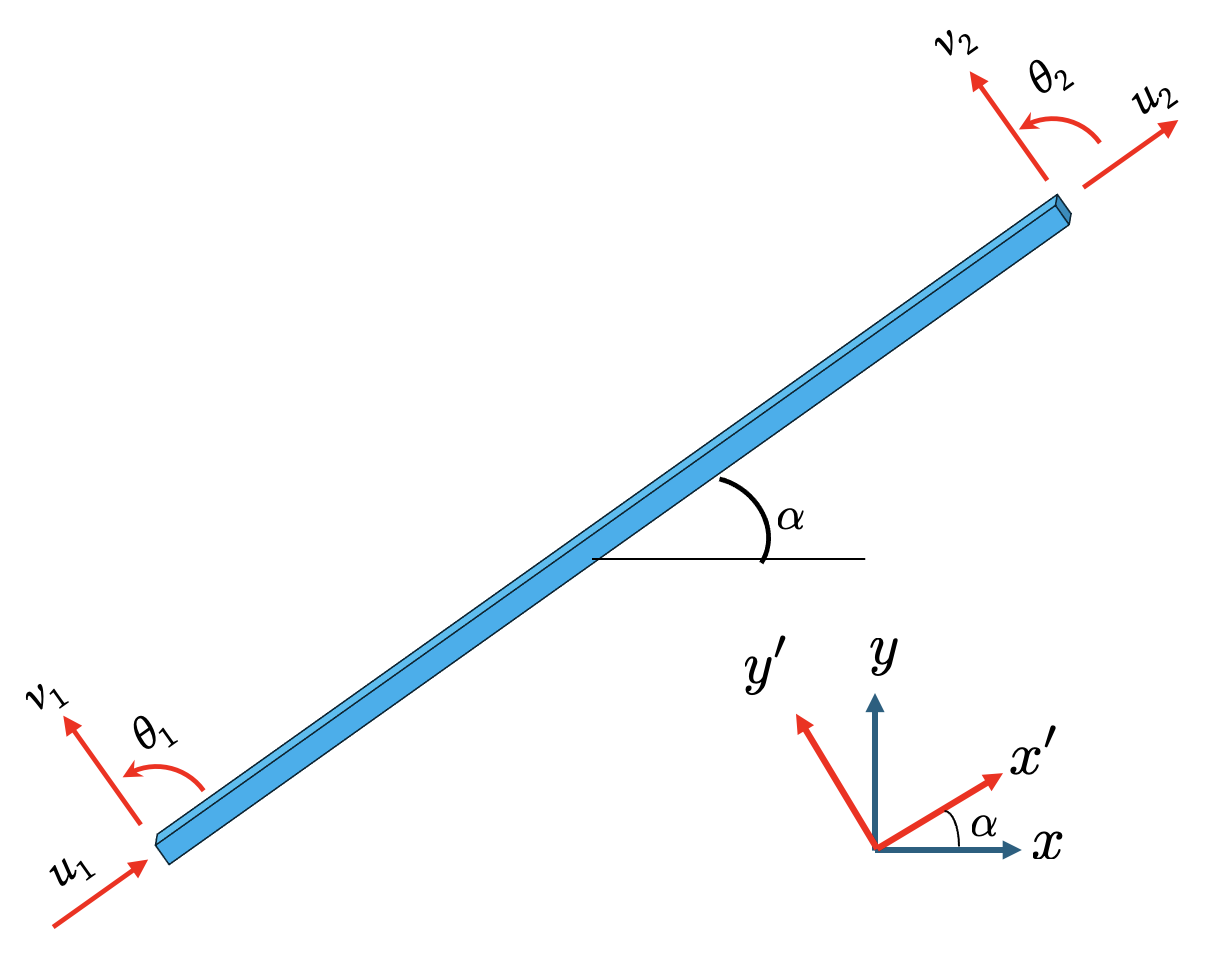
La transformación de los grados de libertad y es la misma que la transformación de u y v para un elemento de celosía. Dado que el grado de libertad es el mismo en ambos sistemas de coordenadas, la matriz de transformación se convierte en
donde La matriz de rigidez en el sistema de coordenadas global se convierte en