Elemento cuadrilátero distorsionado: sistema de coordenadas naturales
La formulación del elemento rectangular es simple y efectiva, pero tiene un inconveniente importante: está definida para un rectángulo perfecto cuyos lados están alineados con los ejes cartesianos globales (x, y). Las geometrías del mundo real son complejas, y a menudo es ineficiente o imposible mallar una forma compleja usando solo rectángulos perfectos.
Si intentamos usar las funciones de forma derivadas anteriormente para una forma cuadrilátera general y distorsionada, no cumplirán las propiedades requeridas (por ejemplo, una función de forma puede no ser cero a lo largo de un borde opuesto). Esto se debe a que las funciones están vinculadas explícitamente a las coordenadas x e y y a las dimensiones específicas del elemento, a y b.
Para analizar elementos cuadriláteros de forma arbitraria, debemos introducir un nuevo sistema de coordenadas que sea independiente de la forma del elemento en el sistema global. Esto nos lleva al concepto de Coordenadas Naturales.
1. El Sistema de Coordenadas Naturales
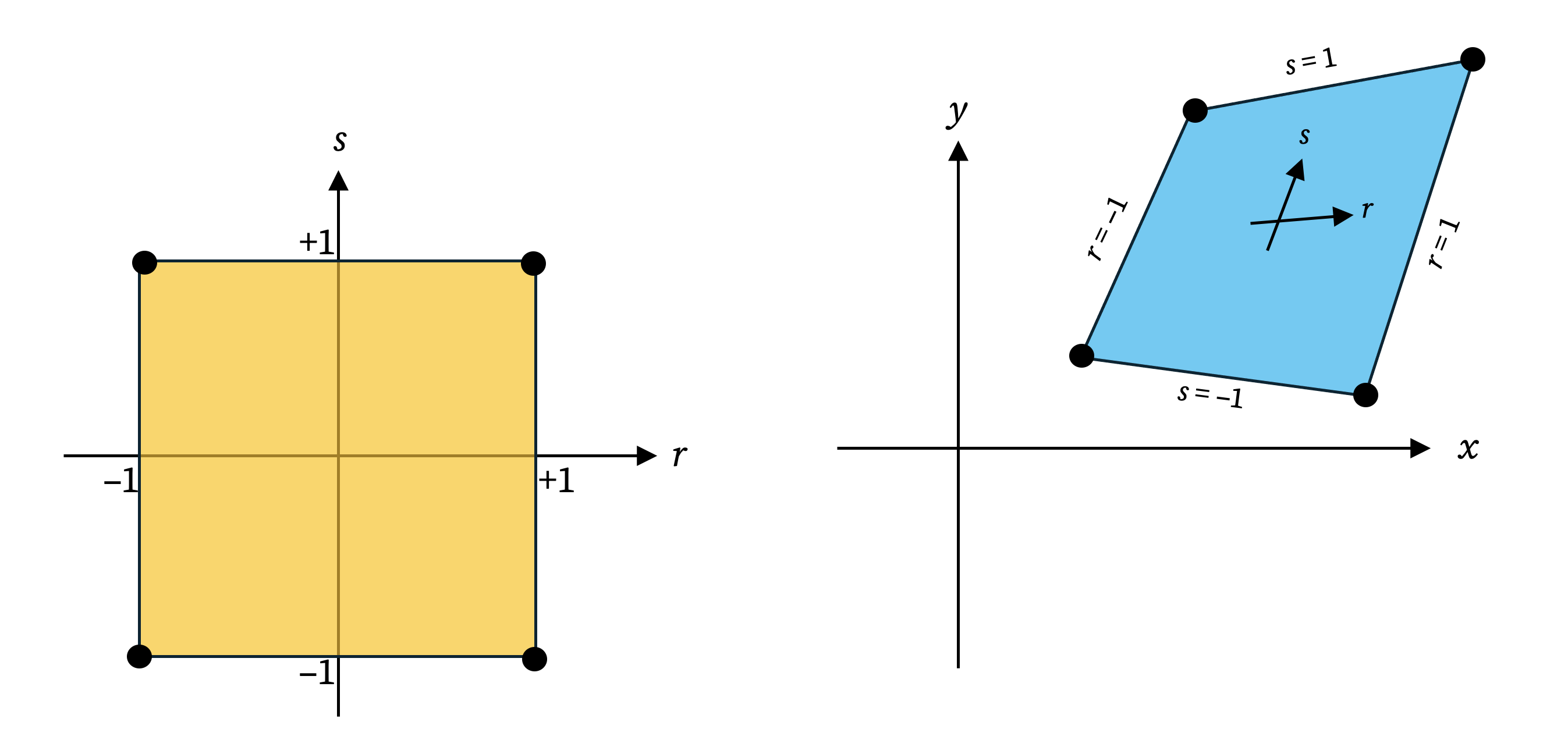
La idea central del sistema de coordenadas naturales es mapear cualquier cuadrilátero de forma arbitraria en el sistema de coordenadas global (x, y) a un único elemento "padre" perfectamente cuadrado en un sistema de coordenadas local (r, s).
- Sistema Global (Elemento Real): El elemento físico con coordenadas x e y. Puede estar distorsionado, y sus lados pueden no ser paralelos.
- Sistema Natural (Elemento Padre): Un cuadrado perfecto definido por las coordenadas r y s, donde tanto r como s varían de -1 a +1.
Este mapeo transforma una geometría compleja en una simple y estandarizada, lo que simplifica enormemente la formulación, especialmente la integración.
2. Formulación Isoparamétrica: Mapeo y Funciones de Forma
La genialidad de la formulación isoparamétrica es usar las mismas funciones de forma tanto para definir el mapeo geométrico como para interpolar el campo de desplazamientos.
2.1 Funciones de Forma en Coordenadas Naturales
En el cuadrado padre (r, s), las funciones de forma para el elemento de 4 nodos tienen una forma simple y universal, análoga al método del producto usado para el rectángulo:
Estas funciones son siempre las mismas, independientemente de la forma del elemento real en el plano (x, y).
2.2 El Mapeo Geométrico
La conexión entre los dos sistemas de coordenadas se establece usando estas funciones de forma para interpolar las coordenadas globales a partir de las coordenadas nodales:
Este mapeo nos permite encontrar las coordenadas globales (x, y) correspondientes a cualquier punto dado por sus coordenadas naturales (r, s).
2.3 Interpolación de Desplazamientos
Usemos exactamente las mismas funciones para describir el campo de desplazamiento (u, v) en cualquier punto (r, s) dentro del elemento. El campo de desplazamiento continuo se interpola a partir de los valores discretos de desplazamiento nodal u_i y v_i usando el mismo conjunto de funciones de forma:
Aquí, ui y vi son las componentes del vector de desplazamiento nodal q. Esto se puede expresar en forma matricial:
Esta estructura paralela no es una coincidencia; es la definición fundamental de un elemento isoparamétrico.
3. La Matriz Jacobiana: Relacionando Derivadas
Para formar la matriz B, necesitamos las derivadas de las funciones de forma con respecto a las coordenadas globales, x e y. Sin embargo, nuestras funciones de forma están definidas en términos de las coordenadas naturales, r y s. Podemos relacionar estas derivadas usando la regla de la cadena de la diferenciación parcial:
Este sistema se puede escribir en forma matricial:
La matriz en esta ecuación es la Matriz Jacobiana, J.
Dado que necesitamos las derivadas con respecto a x e y para formar la matriz B, debemos invertir esta relación:
Los términos de la Jacobiana se pueden calcular diferenciando las ecuaciones de mapeo (por ejemplo, ).
6. Integración en Coordenadas Naturales
El paso final es transformar la integral de la matriz de rigidez al sistema de coordenadas naturales. El elemento diferencial de área también se transforma:
El determinante de la Jacobiana, det(J), actúa como un factor de escala entre las áreas diferenciales en los dos sistemas. La integral de la matriz de rigidez del elemento se convierte en:
Esta integral tiene límites constantes de -1 a 1, independientemente de la forma del elemento real. Esta forma estandarizada es ideal para técnicas de integración numérica, como la Cuadratura Gaussiana, que es el método estándar para evaluar estas integrales en software de MEF.