El elemento triangular bidimensional
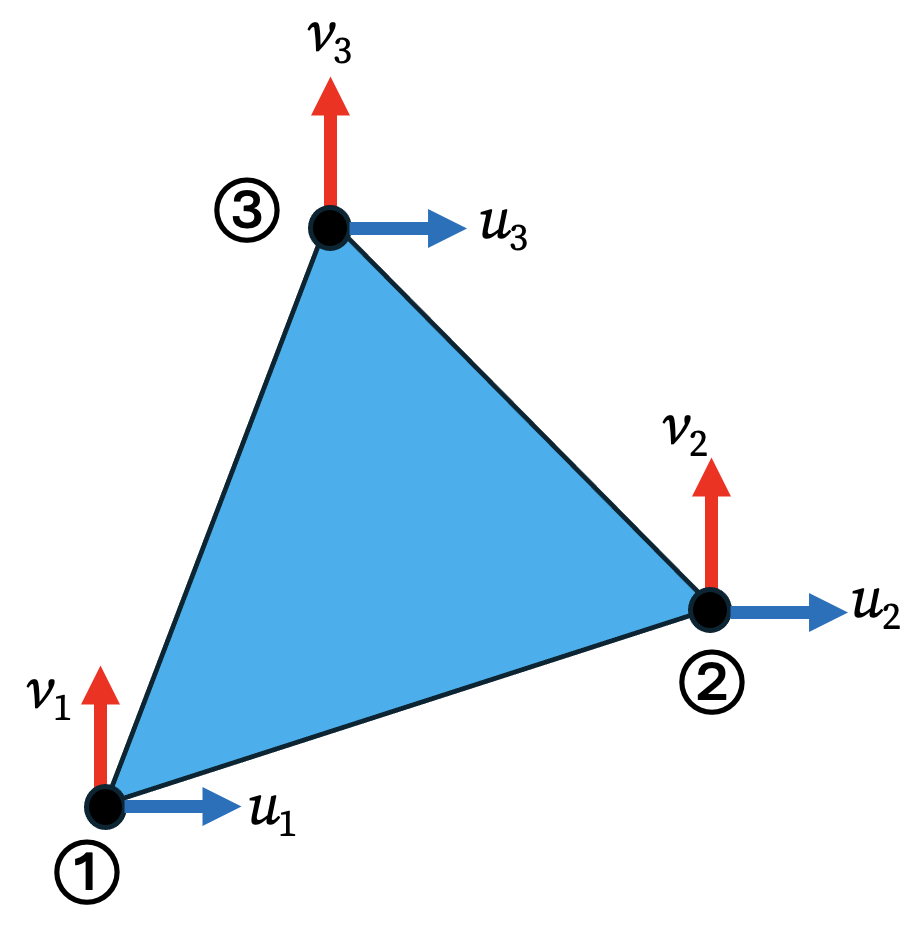
Ahora extendemos los principios del Método de Elementos Finitos a dominios bidimensionales. El elemento más simple para discretizar un continuo 2D es el Elemento Triangular. Consideremos tres nodos en cada esquina del triángulo y los nodos están numerados en sentido antihorario. Cada nodo tiene dos grados de libertad y .
1. Formulación para Elasticidad Bidimensional
Antes de derivar las propiedades de este elemento, debemos establecer las relaciones gobernantes para la elasticidad bidimensional.
El estado de tensión y deformación en cualquier punto puede representarse mediante vectores.
El vector de tensiones de Voigt se define como:
El vector de deformaciones de Voigt correspondiente es:
La relación entre tensión y deformación es la ley constitutiva, que para un material elástico lineal se expresa en forma matricial como: Aquí, E es la matriz de elasticidad, que contiene las propiedades del material. (Esta matriz no debe confundirse con el módulo de Young escalar, E, utilizado en su definición).
Para problemas 2D, típicamente se hace una de dos suposiciones simplificadoras: tensión plana o deformación plana.
Tensión Plana: Se asume para estructuras delgadas cargadas en su propio plano (). La matriz de elasticidad es:
Deformación Plana: Se asume para estructuras largas con una sección transversal uniforme donde la deformación fuera del plano es cero (). La matriz de elasticidad es:
2 La matriz deformación-desplazamiento [B]
Supuestos: El campo de desplazamiento dentro del elemento, u(x, y) en la dirección x y v(x, y) en la dirección y, se interpola a partir de los valores de desplazamiento nodal usando funciones de forma Ni. Se supone que el desplazamiento en una dirección dada depende solo de los desplazamientos nodales en esa misma dirección. Es decir,
Las deformaciones son las derivadas del campo de desplazamiento. Para un problema bidimensional, las relaciones son:
Al sustituir los campos de desplazamiento interpolados en estas definiciones de deformación, podemos construir una relación entre el vector de deformaciones de Voigt y el vector de desplazamientos nodales . Esta relación define la matriz de deformación-desplazamiento, B.
Para un elemento triangular de 3 nodos, el vector de desplazamiento nodal se ordena como:
La matriz de deformación-desplazamiento B es, por lo tanto, una matriz de compuesta por las derivadas de las funciones de forma:
3. Derivación de las Funciones de Forma
Para determinar la matriz B, primero debemos encontrar la forma explícita de las funciones de forma, Ni. Para el elemento triangular de 3 nodos, asumimos el campo de desplazamiento más simple posible: un polinomio lineal.
Los coeficientes A1, A2 y A3 son constantes. Para relacionarlos con los desplazamientos nodales físicos, imponemos esta ecuación en cada uno de los tres nodos:
Este sistema de ecuaciones puede invertirse para resolver los coeficientes Ai en términos de los desplazamientos nodales ui y las coordenadas nodales.
Sustituyendo estos de vuelta en el polinomio lineal y reordenando se llega a la forma final de las funciones de forma:
Las funciones de forma derivadas del campo polinomial lineal toman la forma: donde A es el área del elemento y ai, bi y ci son coeficientes compuestos por las coordenadas nodales.
- Observe que Ni(x, y) es la ecuación de un plano cuyo valor es 1 en el nodo i y cero en los otros dos nodos.
4. La Matriz B de Deformación Constante y la Rigidez del Elemento
Las derivadas de estas funciones de forma son:
Una consecuencia crítica de la función de forma lineal es que sus derivadas son constantes. Dado que la matriz [B] está compuesta enteramente por estas derivadas, la matriz [B] para este elemento también es constante. De la relación {ϵ} = [B]{q}, esto implica que la deformación {ϵ} es uniforme en todo el elemento, razón por la cual se denomina Triángulo de Deformación Constante (CST, por sus siglas en inglés).
La matriz de rigidez del elemento K se encuentra integrando sobre el dominio del elemento Ω:
Para un elemento de espesor constante t, esta integral de volumen se convierte en una integral de área:
Dado que B, E y t son todos constantes, pueden sacarse fuera de la integral, lo que se simplifica al área A. Esto produce la expresión final para la matriz de rigidez del elemento:
5. Continuidad Interelemental y Elementos de Orden Superior
Surge una pregunta con respecto a la continuidad del desplazamiento. Sabemos que el desplazamiento es continuo en los nodos, pero ¿es continuo a lo largo de los bordes entre nodos?
La respuesta es sí. Dado que el campo de desplazamiento es lineal, su variación a lo largo de cualquier borde es una interpolación lineal entre los dos valores nodales de las esquinas. Un elemento adyacente que comparte ese borde tendrá su campo de desplazamiento descrito por exactamente la misma interpolación lineal. Esto asegura la compatibilidad de desplazamiento entre elementos, una condición conocida como continuidad.
La condición de completitud, que asegura que el elemento puede representar movimiento de cuerpo rígido, se cumple, como lo indica la propiedad:
La precisión del elemento CST está limitada por su suposición de deformación constante. Para modelar problemas con campos de deformación variables de manera más precisa, se utilizan elementos de orden superior. Esto se logra añadiendo nodos al elemento y usando polinomios de orden superior para las funciones de forma. Por ejemplo, añadir nodos en los puntos medios de los lados permite un campo de desplazamiento cuadrático (un triángulo de 6 nodos), lo que resulta en un campo de deformación que varía linealmente.
Estos elementos de orden superior aún poseen solo continuidad . Lograr una continuidad mayor (por ejemplo, , donde las derivadas también son continuas) requiere formulaciones de elementos más complejas.