Vector de tracción o de tensión
Considere una superficie imaginaria que corta un cuerpo en dos partes.
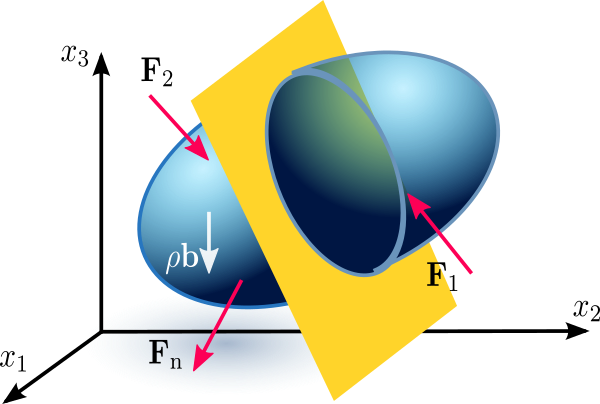
El material de un lado de la superficie ejerce un sistema de fuerzas sobre el material del otro lado.
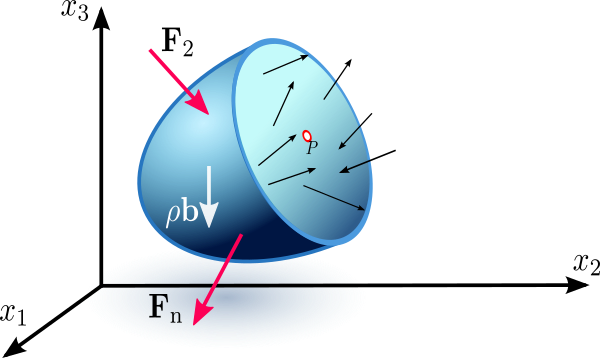
En un pequeño elemento de área que rodea un punto en esta superficie, la resultante de la distribución real de fuerzas sobre esta área es una fuerza y un momento . Sea el vector normal unitario exterior de la superficie en .
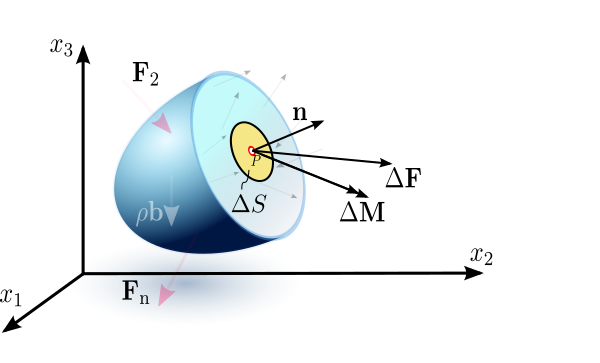
Ahora, hacemos que se reduzca a cero alrededor de de modo que su mayor dimensión también tienda a cero.1 Mientras que y también tienden a cero, una suposición fundamental de la mecánica de medios continuos es que la relación se aproxima a un límite definido, mientras que el efecto del momento desaparece.2 Este límite de la relación de fuerzas se denomina vector de tracción o vector de tensiones, denotado por :
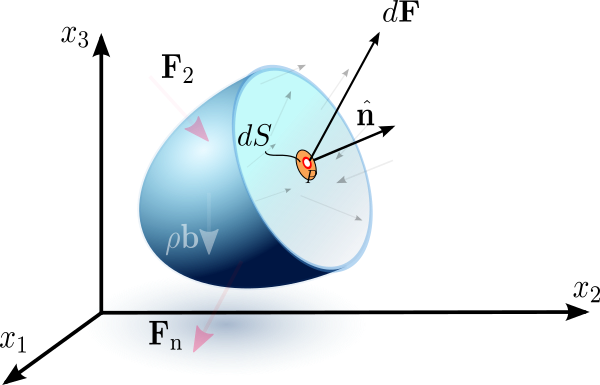
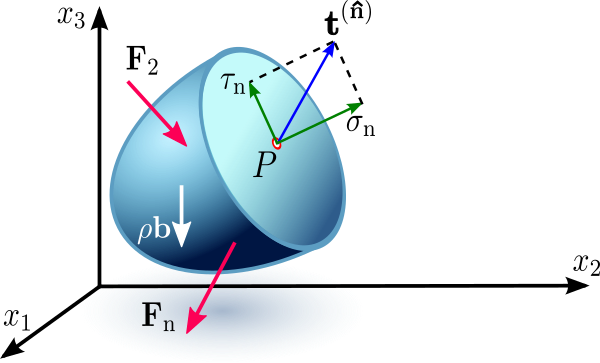
Una hipótesis más fuerte, conocida como postulado de Cauchy, también se hace: el vector de tracción depende solo del punto y de la orientación de la superficie, , y es independiente de la forma del elemento o de la curvatura de la superficie. El superíndice indica esta dependencia del vector normal.3
El vector de tensión se puede descomponer en dos componentes: una tensión normal que es perpendicular a y una tensión de corte (o tensión cortante) que se encuentra en el plano.
- Note que contradice el hecho de que los materiales están compuestos de átomos y moléculas, pero tenga en cuenta que (a) asumimos que el material es continuo y que no hay espacio vacío entre las partículas. (b) La definición anterior es muy abstracta y nunca se usa en la práctica.↩︎
- Una rama de la mecánica de medios continuos llamada teoría de tensiones de par (o teoría de Cosserat) explora materiales donde no se aproxima a cero. En cambio, se aproxima a un límite llamado vector de par de tensiones, que es importante para modelar materiales con microestructura interna significativa.↩︎
- Note que contradice el hecho de que los materiales están compuestos de átomos y moléculas, pero tenga en cuenta que (a) asumimos que el material es continuo y que no hay espacio vacío entre las partículas. (b) La definición anterior es muy abstracta y nunca se usa en la práctica.↩︎