Simetría del tensor de tensiones
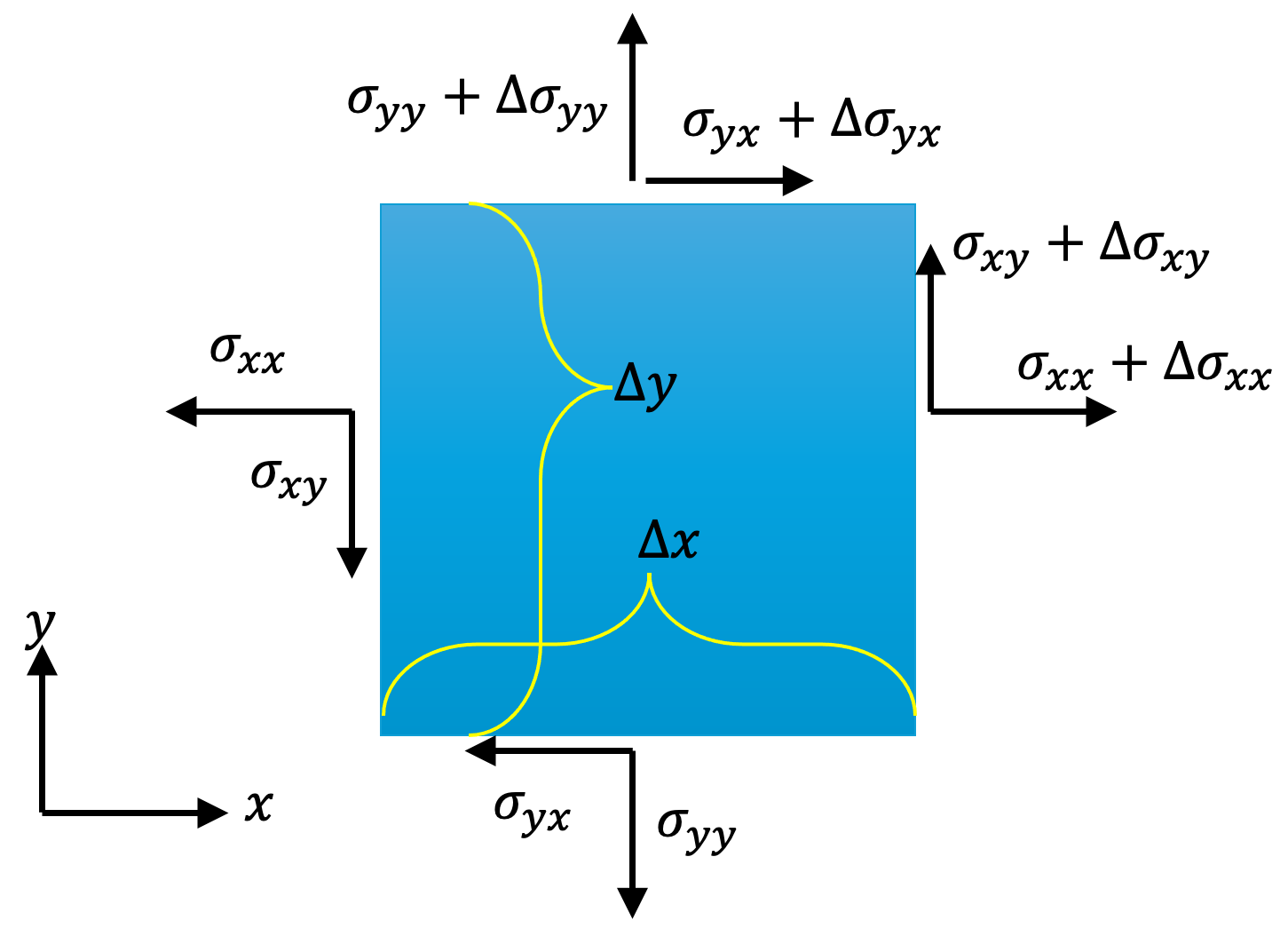
Considere un paralelepípedo rectangular de dimensiones , y .
Se sigue de la segunda ley de Newton para el movimiento rotacional, que donde es el momento resultante respecto al eje z, es el momento de inercia (o masa rotacional) respecto al eje y es la aceleración angular.
De la estática, recordamos que el momento de inercia de un bloque rectangular respecto al eje centroidal es donde es la masa del elemento. Expresando en términos de la densidad, podemos escribir donde es la densidad de masa del material en el punto.
Las componentes de la tensión que contribuyen a son las tensiones cortantes en el plano . Las fuerzas de volumen no contribuyen al momento. Así, el momento total se puede expresar como
Aplicando la misma lógica para rotaciones alrededor de los ejes x e y, podemos demostrar que y . Esto significa que en general y el tensor de tensiones siempre es simétrico, y para especificarlo solo necesitamos 6 componentes independientes (en lugar de 9). El resultado se mantiene independientemente de si el cuerpo está en reposo, en movimiento uniforme o acelerando. 1 Este resultado se conoce como Segunda Ley del Movimiento de Cauchy.
- El único caso en el que se puede violar la simetría de la tensión es cuando existen tensiones de par (momentos distribuidos). Entran en juego para materiales muy específicos en casos específicos. Este fenómeno solo es relevante para materiales donde la microestructura subyacente influye en la respuesta mecánica macroscópica, una consideración más allá de la teoría clásica.↩︎